Automatic Control Linear Systems PART I
Seems good, so far.
Table of Contents
- Lec 1 What is it about.
- Lec 2 Linear differential equations and their solutions
- IV. Basic of controller design
Lec 1 What is it about.
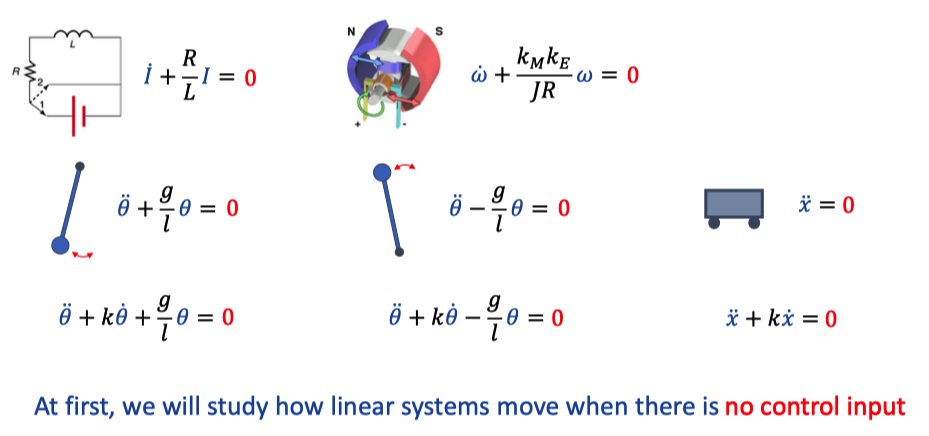
I. Basic physical exapmles
Simple Pendulum
Simple Cart
DC Motor
LR-Circuit(with intention, it becomes LCS)
Solar system(a little over simplified, dynamic, nonlinear)
II. Differential equations arise from physics
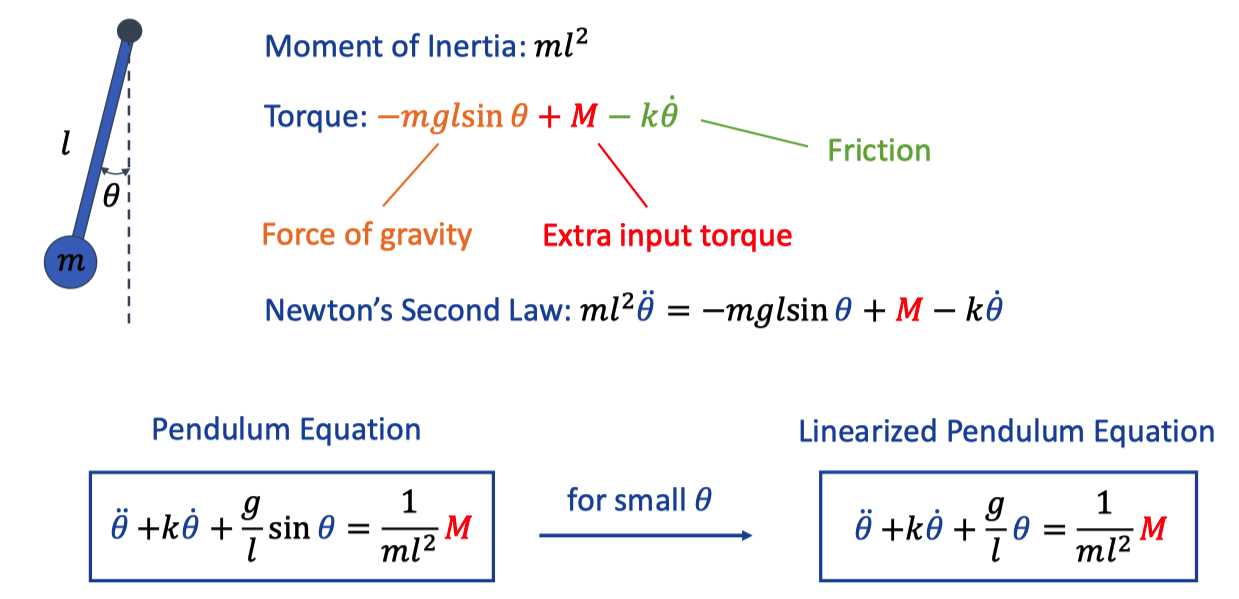
1. Pendulum(downward position, with friction)
Harmonic form(left), for small angle makes it linearized. Mass is concentrated on one end.
What if the friction doesn’t exist?
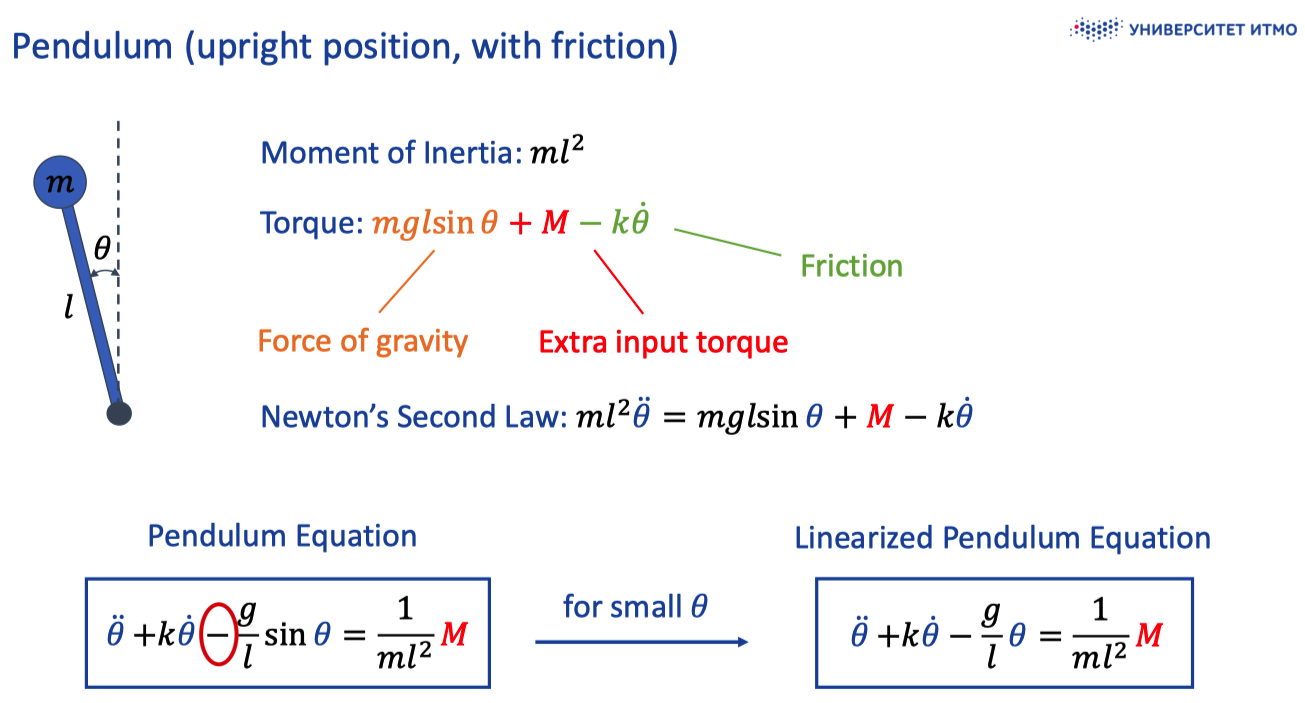
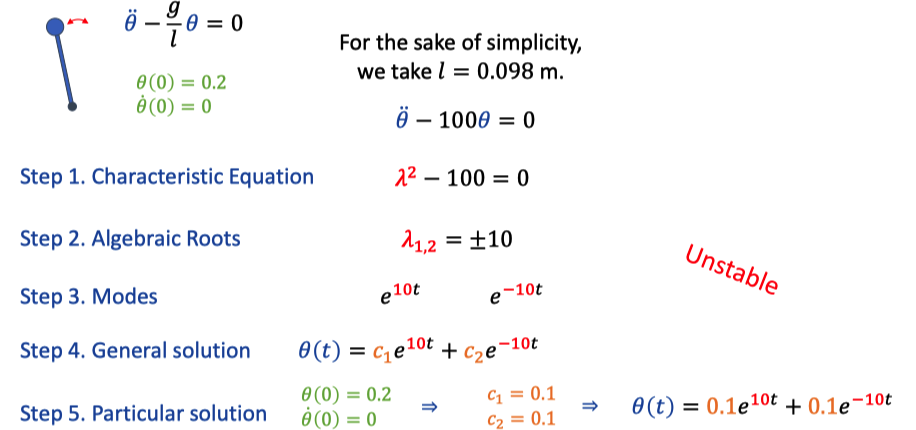
2. Pendulum(upright position, with friction)
Basically the same. Note that the equation stays true in the condition of small θ.
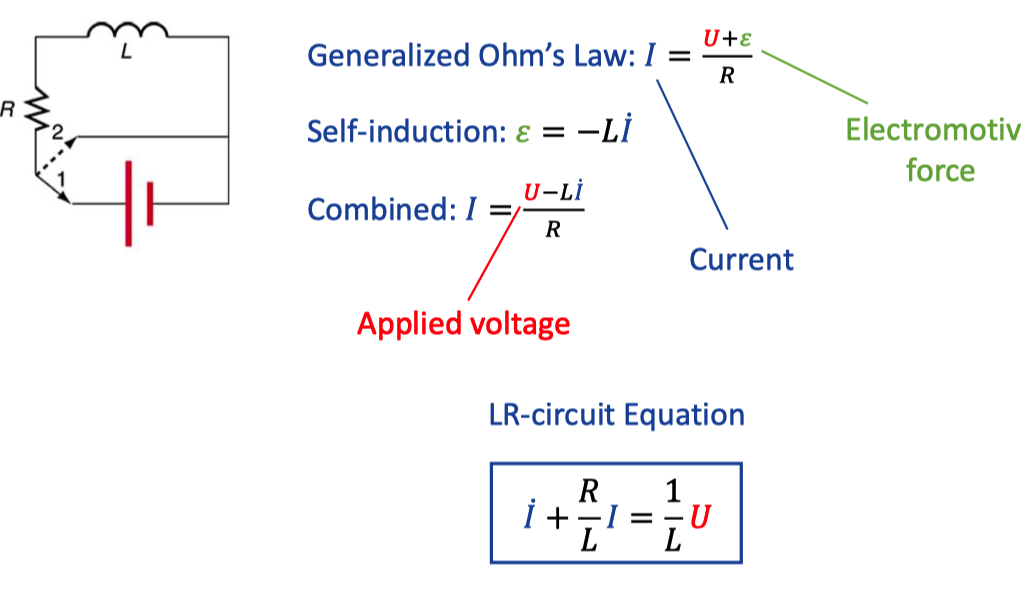
3. LR-circuit
Magnetic flux is L * I, electromotive force is derived from Faraday law.
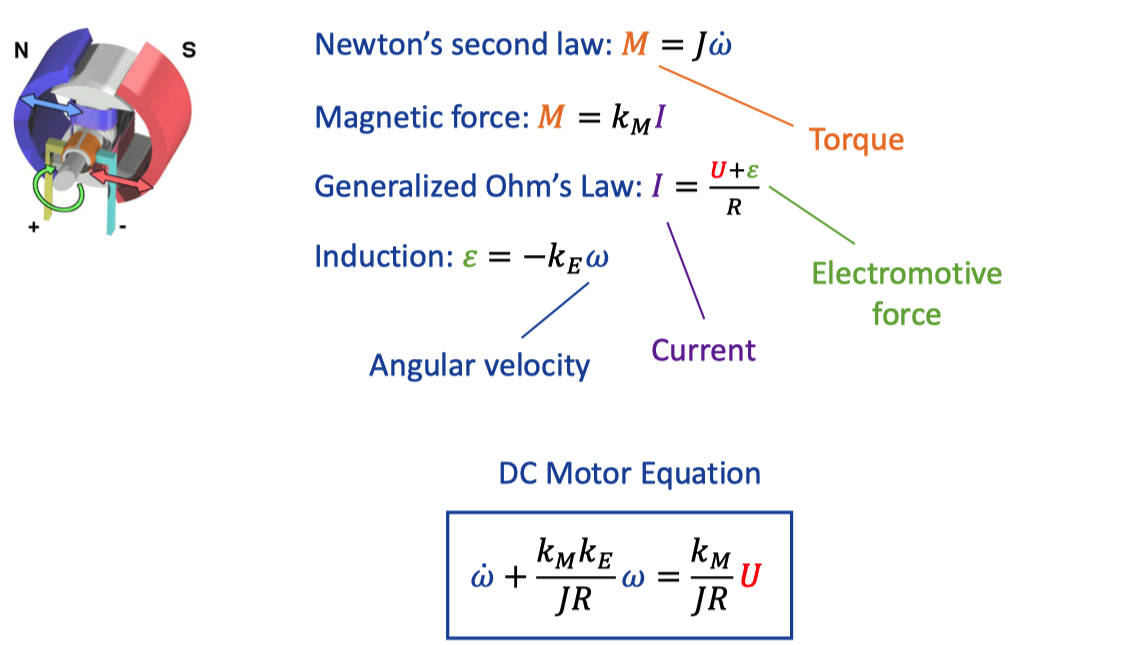
4. DC motor
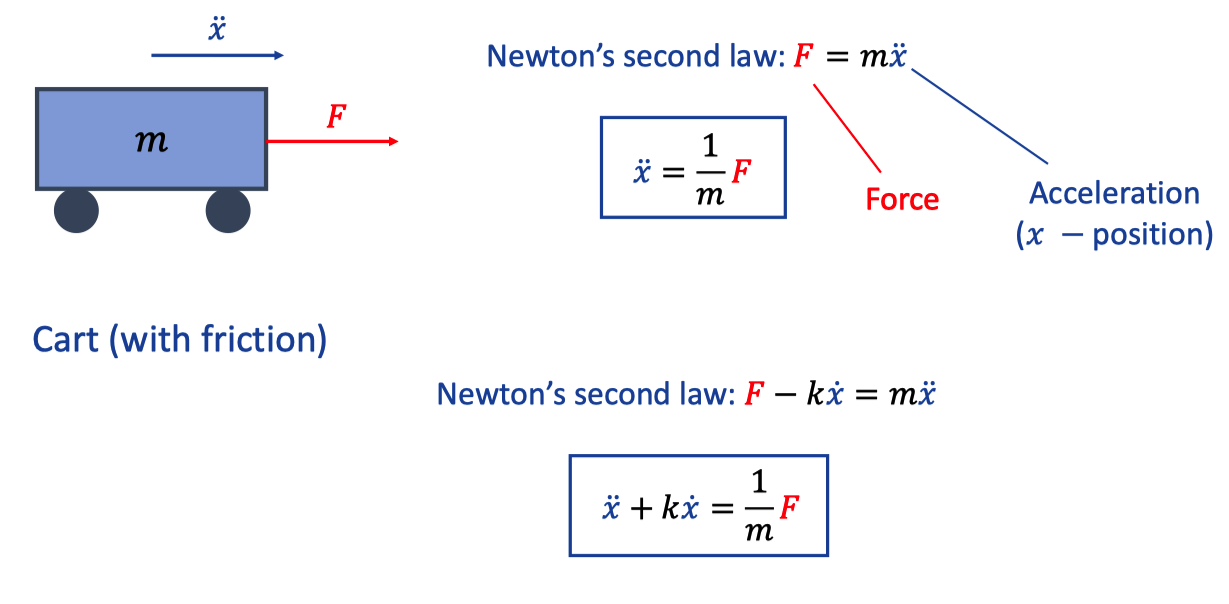
5. Cart|with(out) friction
Comparing these equations, systems have inputs and outputs
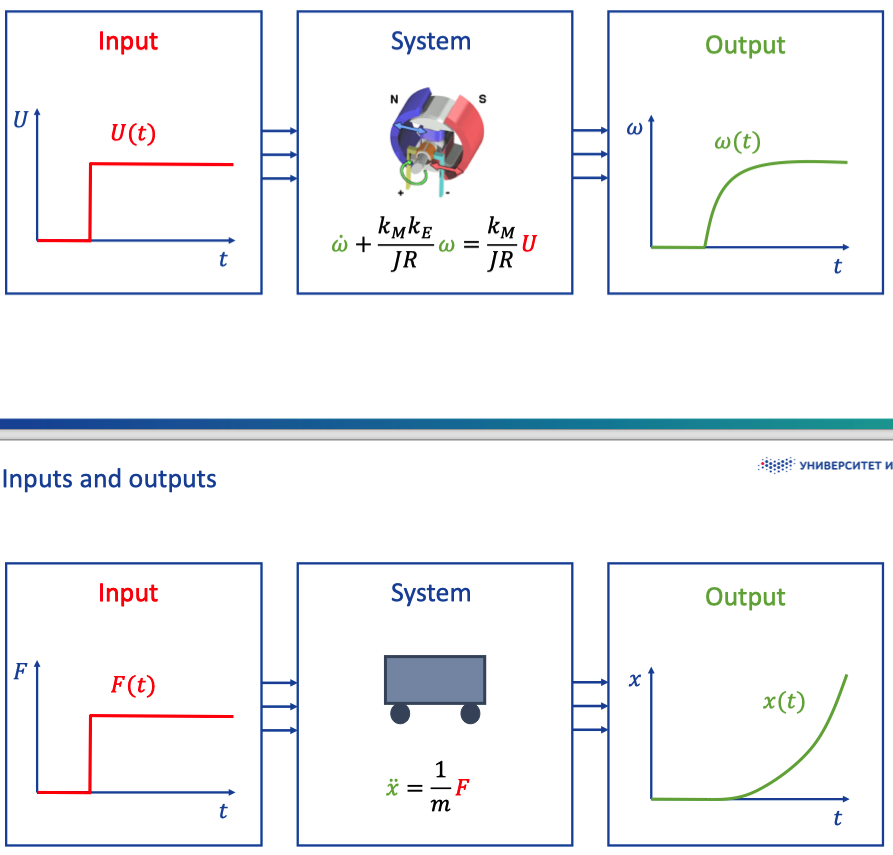
III. Inputs and Outputs
Derivatives in equation makes the the speed of outputs changes.
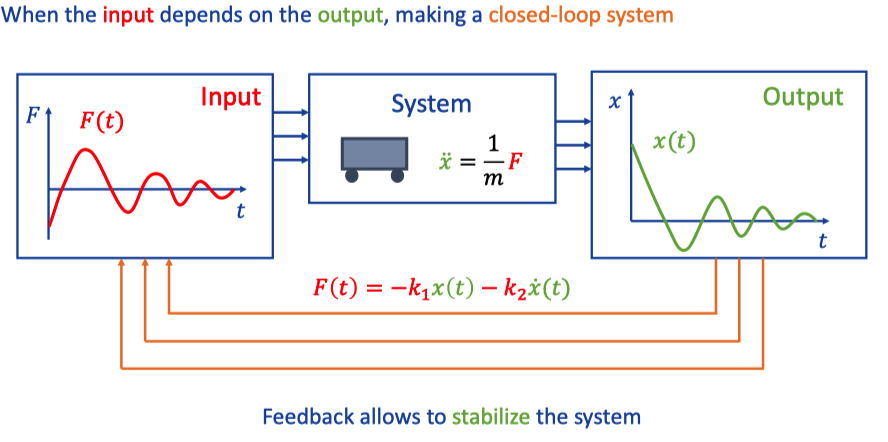
IV. Feedback
1. Our goals
Study how linear system behave on their own, without any input.
Study how linear system respond to different inputs.
Learn to design feedback controllers and state observers
Lec 2 Linear differential equations and their solutions
At first, we will study how linear systems move when there is no control input.
These systems can be called as autonomous systems.
In mathematics, an autonomous system or *autonomous differential equation is a system of ordinary differential equations which does not explicitly depend on the independent variable. When the variable is time, they are also called time-invariant systems.
I. Mathematical background
1. Solution for homogeneous linear ordinary differential equations with constant coefficients
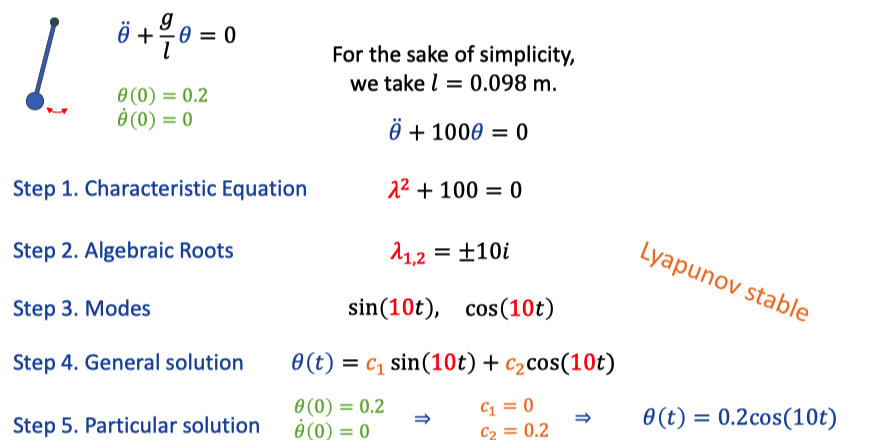
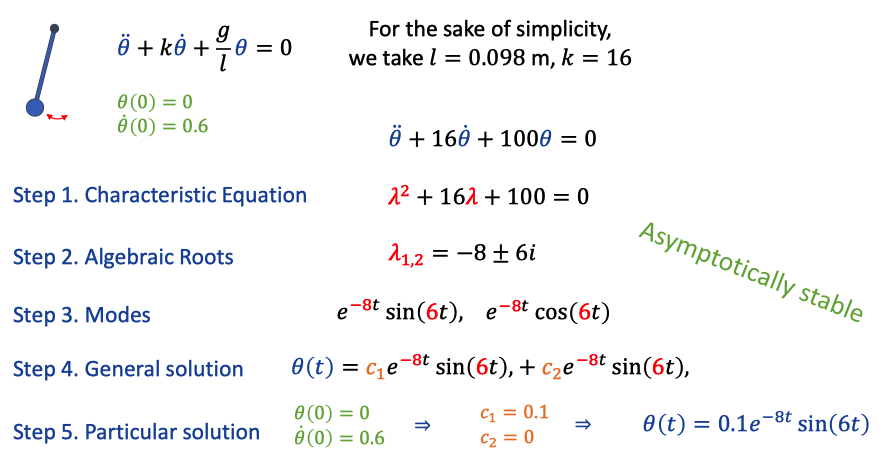
Step1 Characteristic Equation
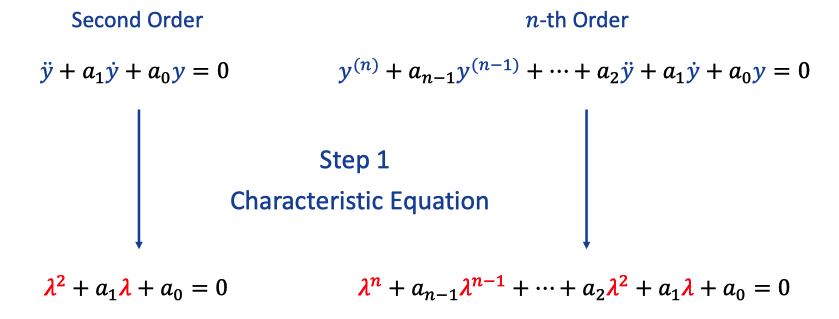
Simply rewrite the eq into algebraic eq. It doesn’t lose information.
Step 2 Find algebraic roots
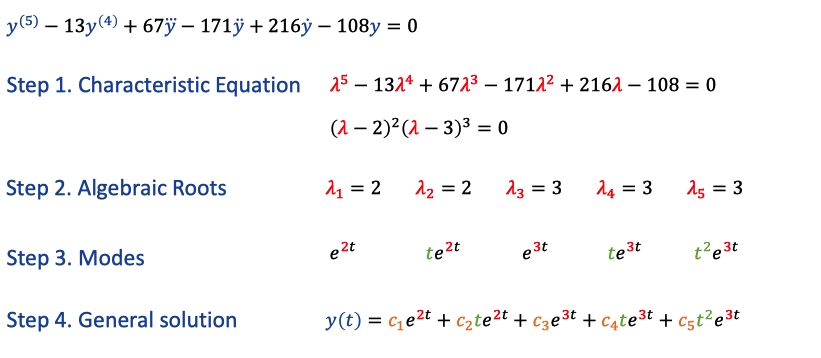
Step 3 Find corresponding Modes
*Modes are simple functions from which solutions of a differential equation are combined. Linearly independent.
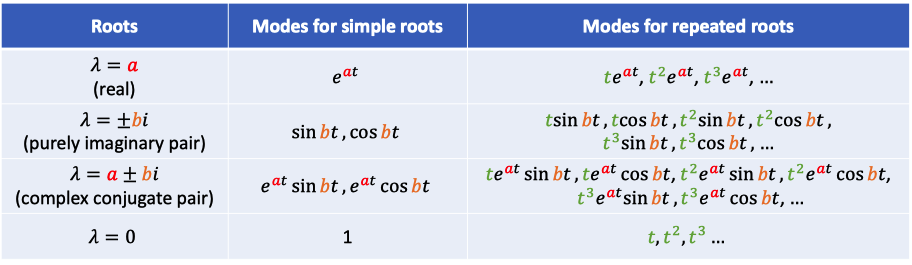
Each next multiplicity of root give you next (set of) mode multiplied by t.
Step 4 Obtain a general solution as a linear combinition of modes with unkown coefficients

Step 5 Obtain the particular solution from the given initial conditions

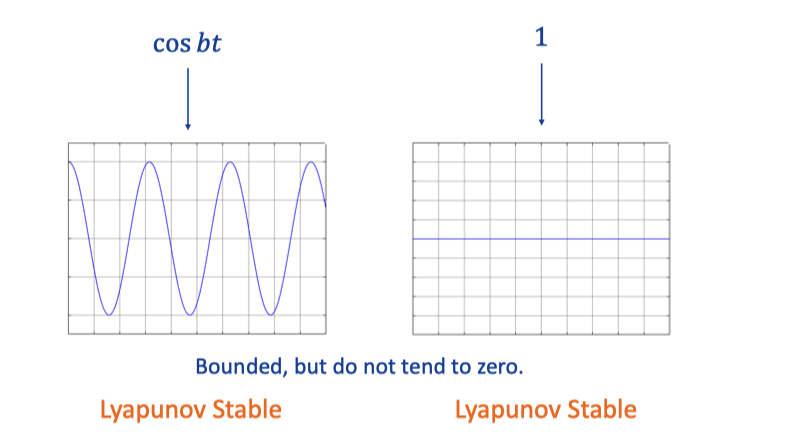
2. Stability of modes
Two different situations.
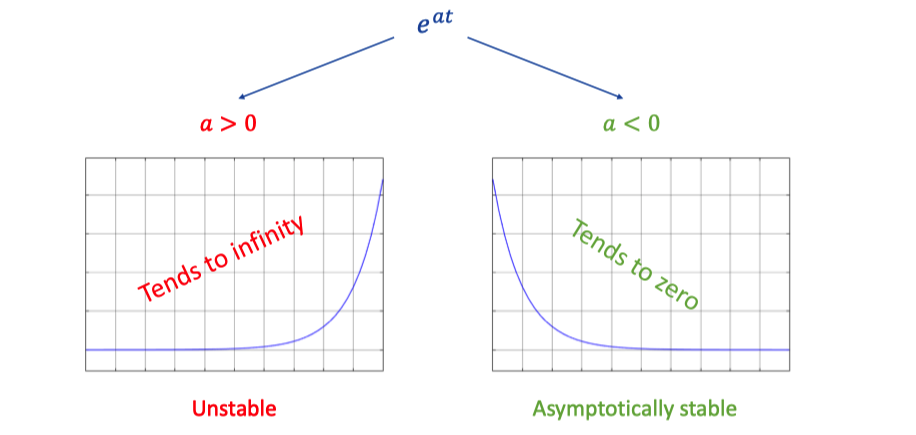
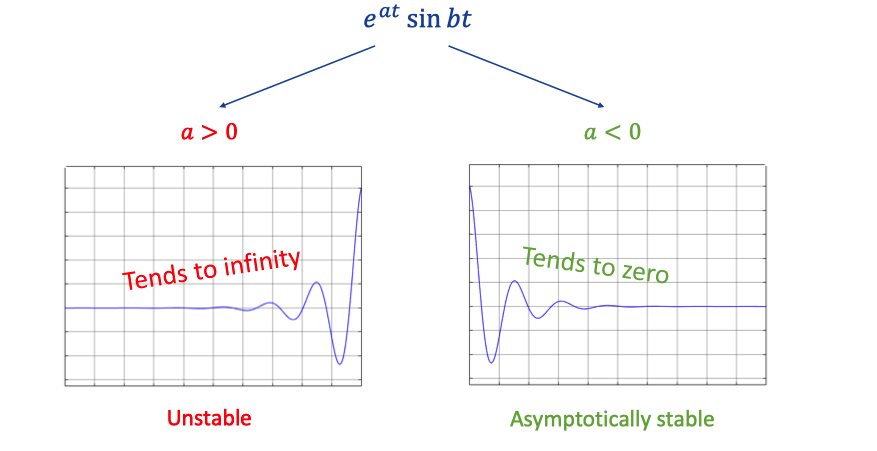
Asymptotically is similar to gradually,, but have a tendency to a straight line.
Lyapunov - do not tend to zero.
II. Stability of a linear system
1. Definition
Linear system is asymptotically stable if all roots of characteristic equations have negative real parts. It means that y(t) tends to 0 for all initial conditions.
- Which means that you can start the system with big initial values, and it will stop.
Linear system is Lyapunov stable if all roots of characteristic equations have either negative or zero real parts, and roots that gave zero real parts are simple (not repeated). It means taht y(t) is bounded for all initial conditions.
- It’s a weaker stability, all asymptotically stable is Lyapunov stable (negative real part), but the latter (zero real parts) may not be the former.
Linear system is unable otherwise. It means taht y(t) is unbounded for some initial conditions.
2. Examples
a. Pendulum downwards without friction
b. Pendulum downwards with friction
c. Pendulum upwards
d. Repeated roots
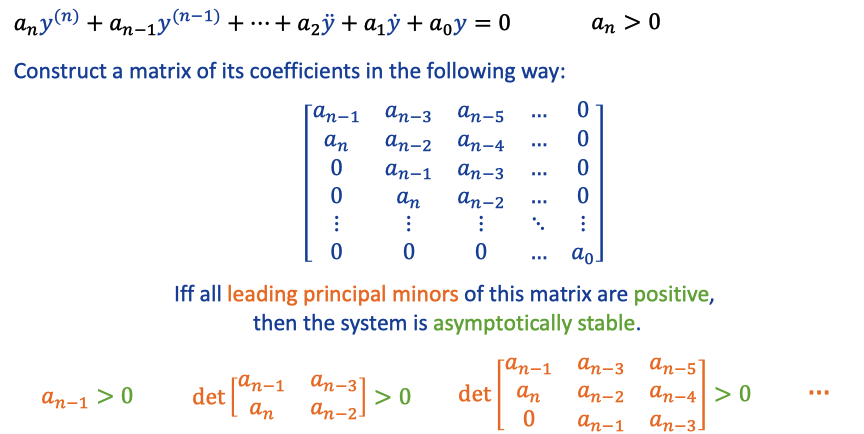
III. Hurwitz criterion
How can we check that a given system is stable or unstable without calculating roots of its characteristic equation.
1. Explanation
2. Simple corollaries
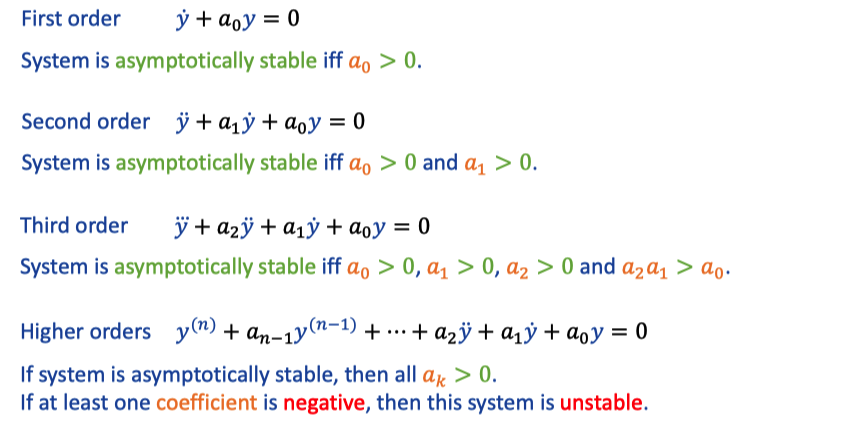
They could have oscillations, or not.
IV. Basic of controller design
1. No control
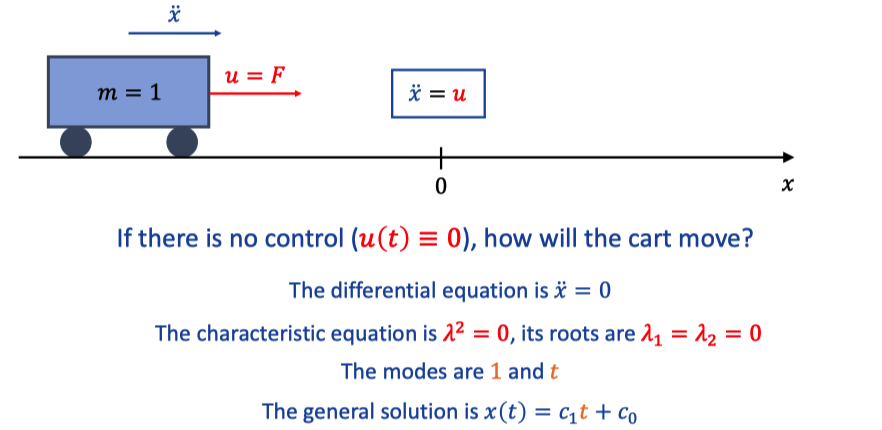
It will move in one direction with constant speed.
2. P-Controller
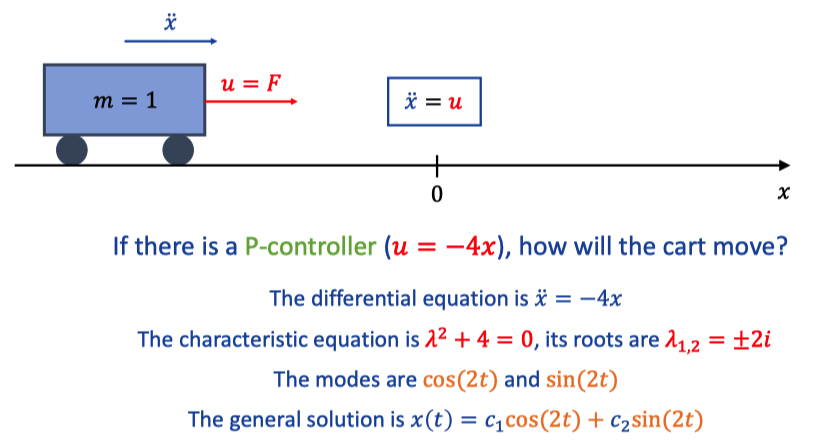
The cart oscillates around x=0 with constant amplitude.
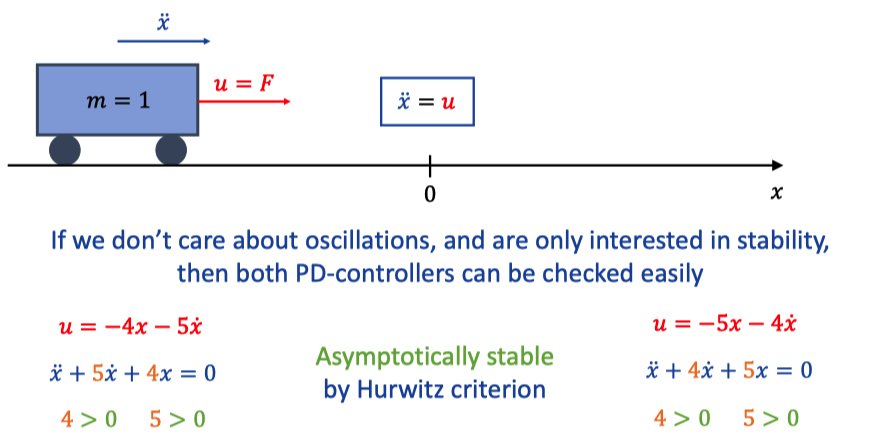
3. PD-Controller
a. Type one
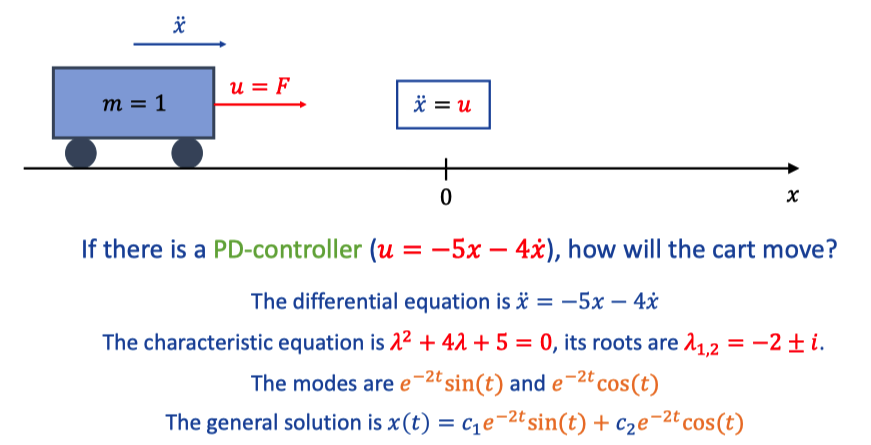
The cart oscillates around x=0 with decaying amplitide.
b. Type two
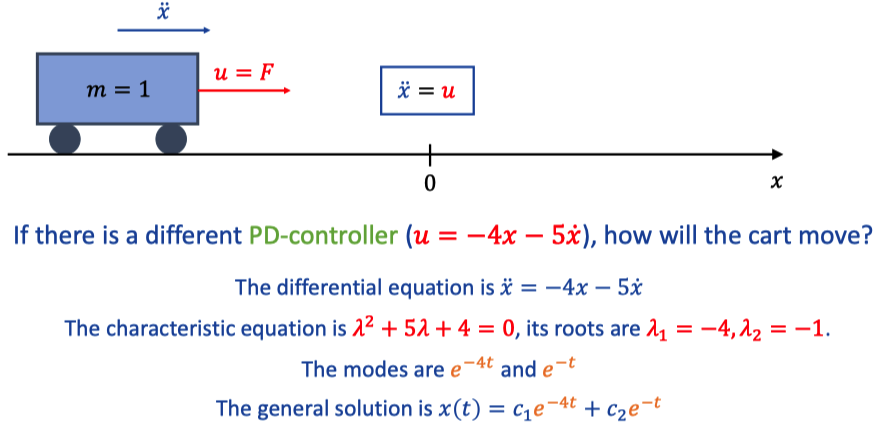
The cart slides to x=0 without oscillations.
c. Check