Automatic Control Linear Systems PART V
Back in the ___
Table of Contents
- Lec 6 Solution of linear dynamical systems. System stability.
Lec 6 Solution of linear dynamical systems. System stability.
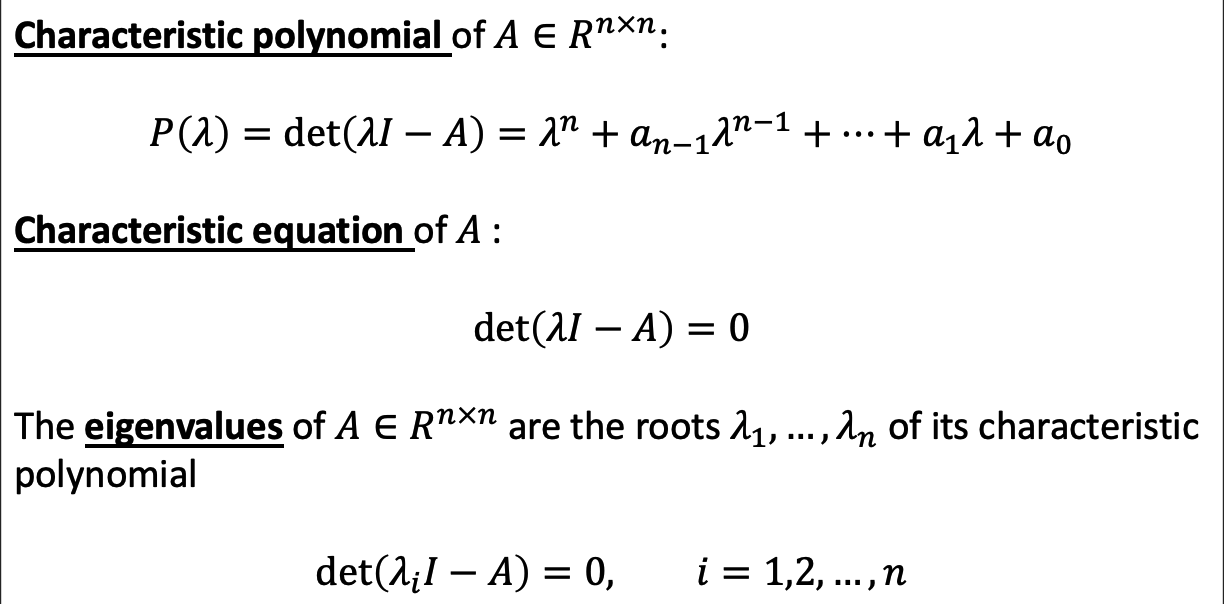
I. Linear Algebra Recall
a. Definition.
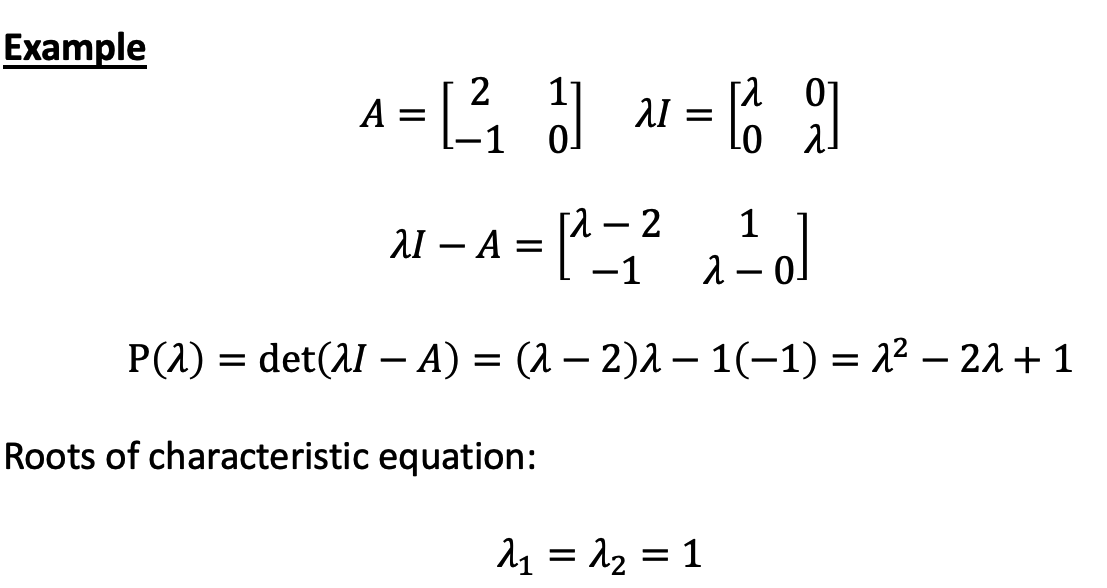
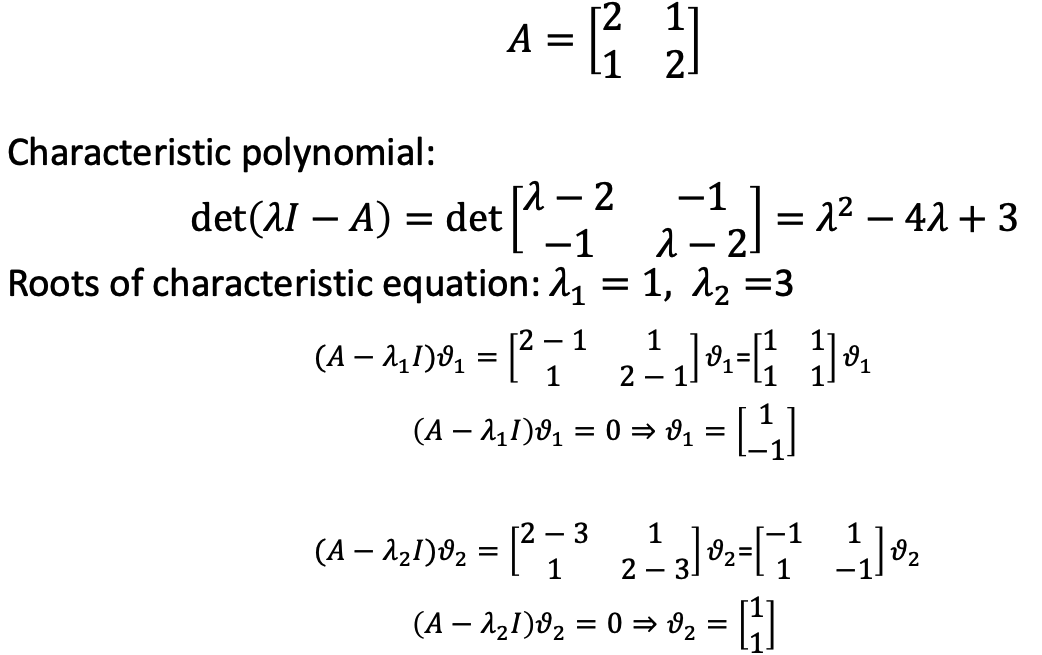
b. Example
c. Definition
d. Example
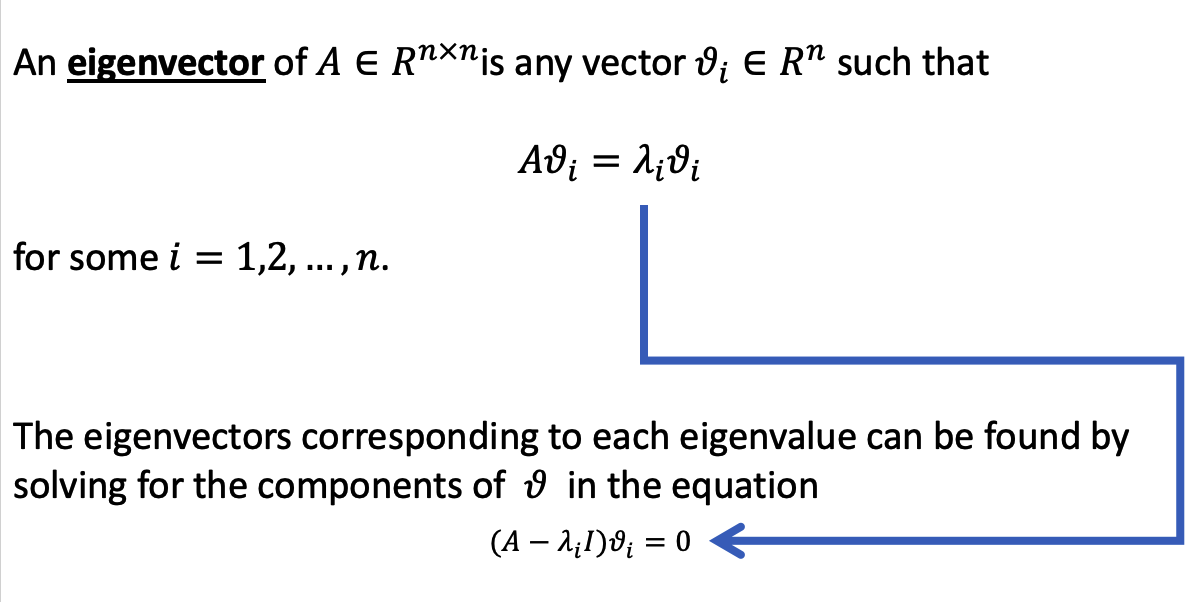
e. Definition
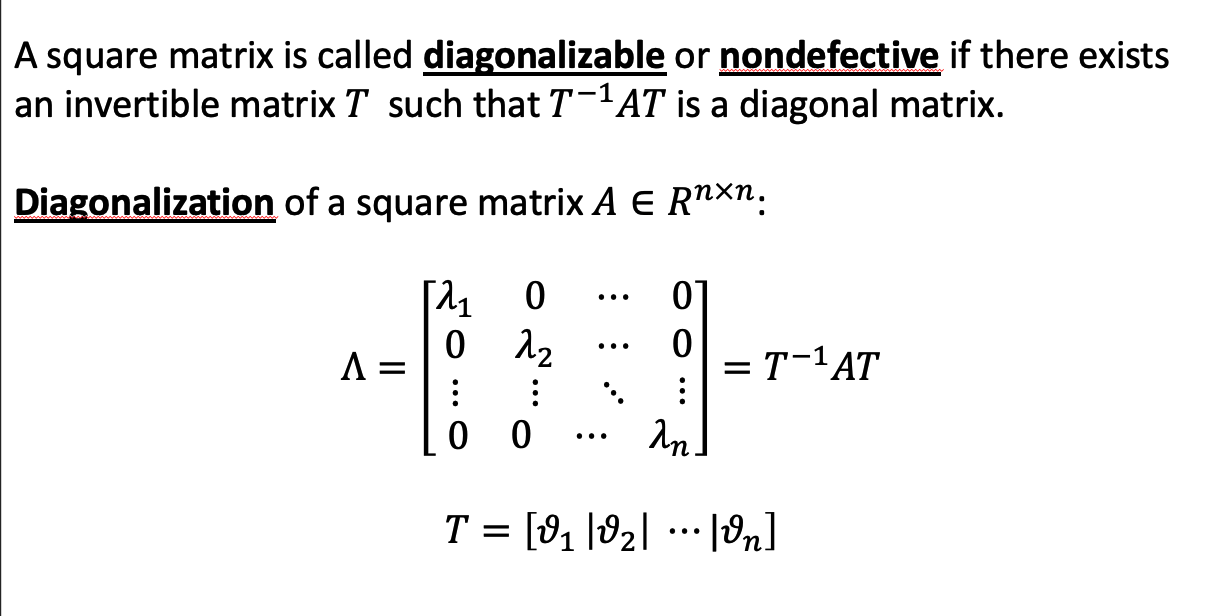
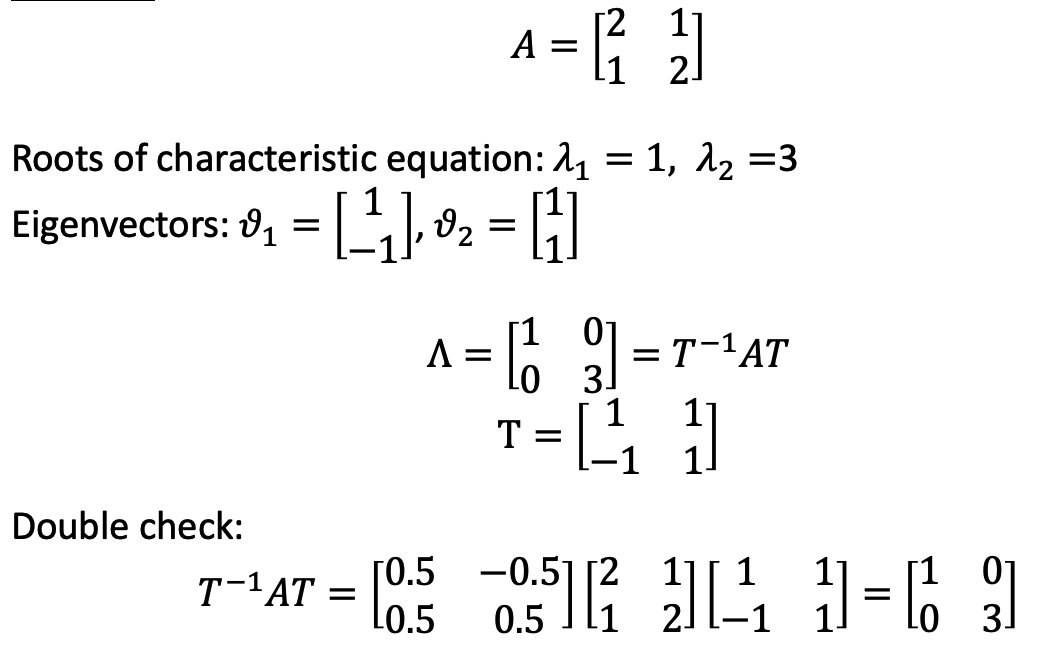
f. Example
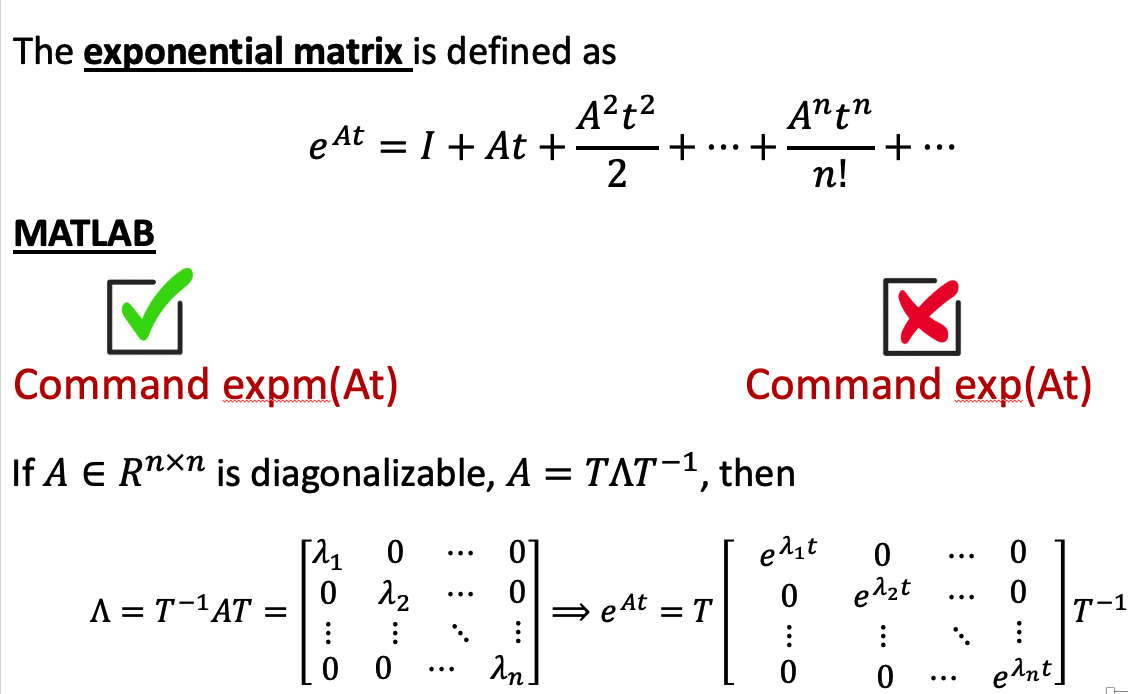
g. Matlab functions

II. Solution of linear dynamical systems
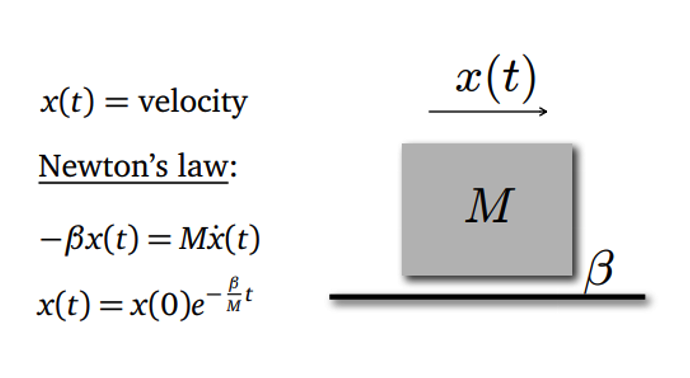
a. Definition
For sth there’s no input.
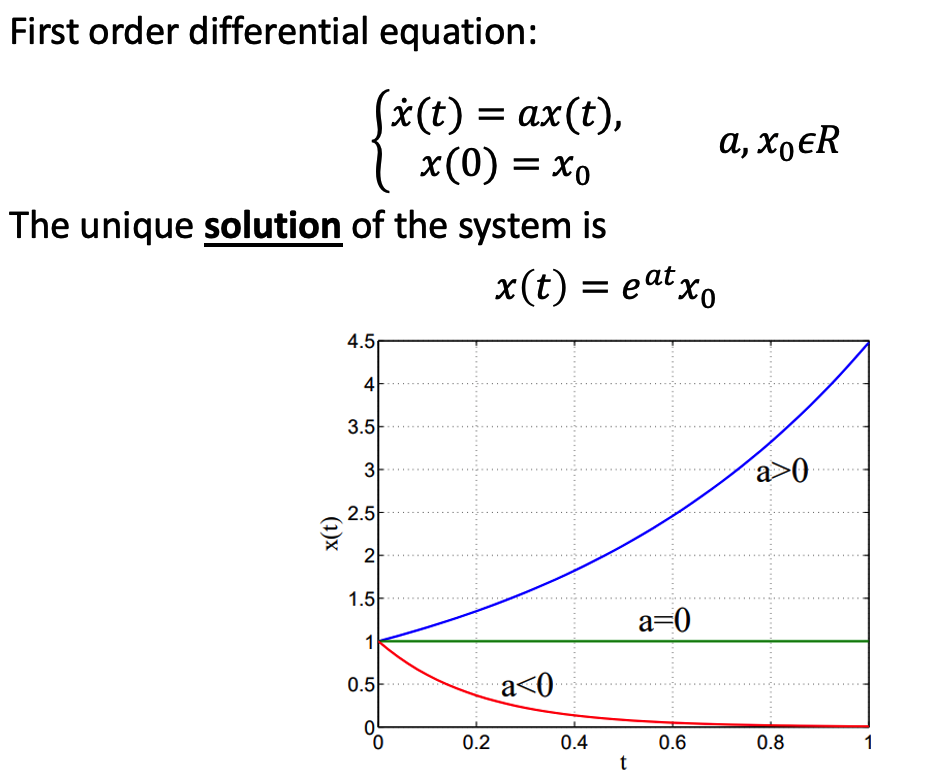
b. Example
c. Definition
How do we derive the answer when input exists.
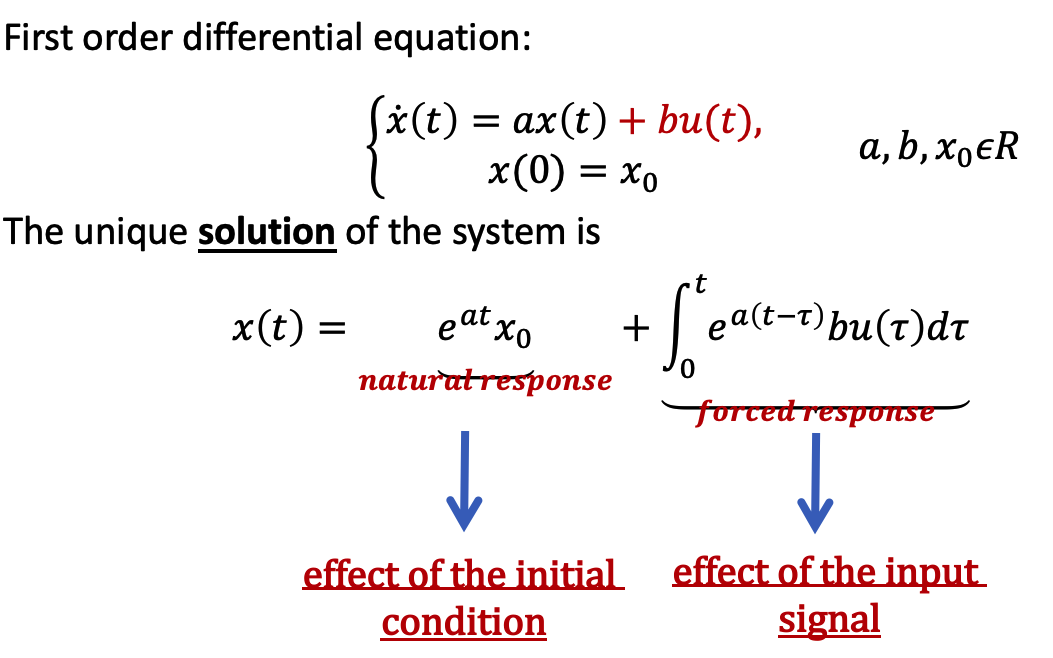
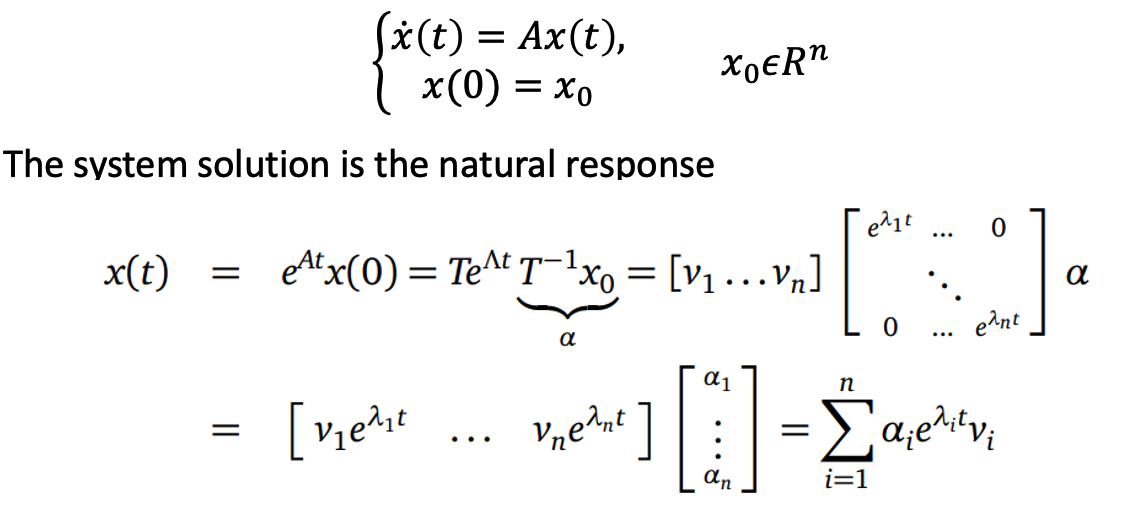
d. Lagrange’s formula
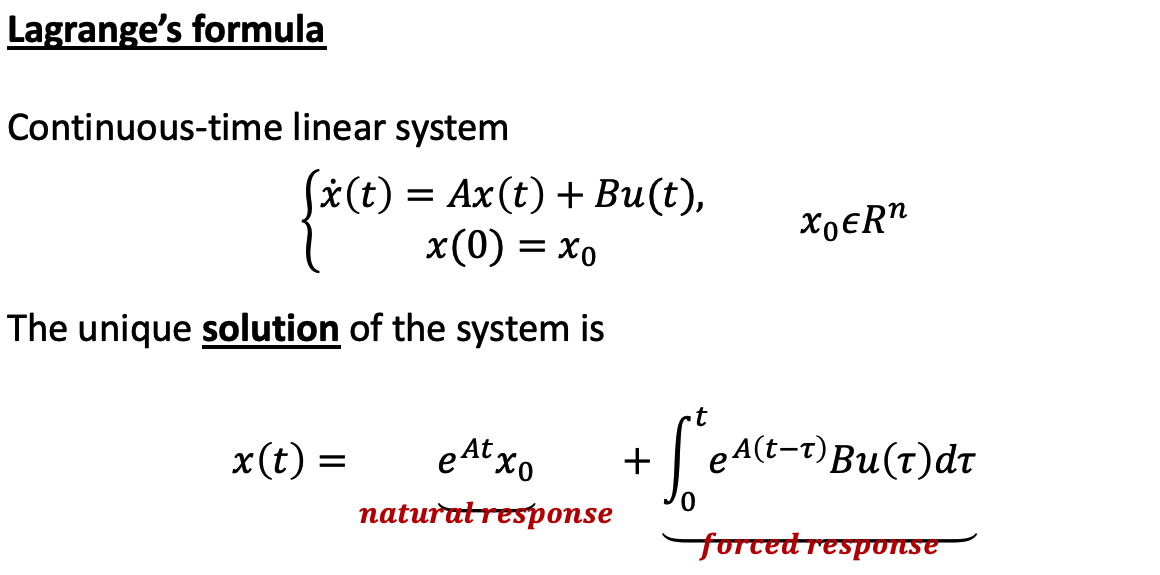
Note that we have matrix exponential here.
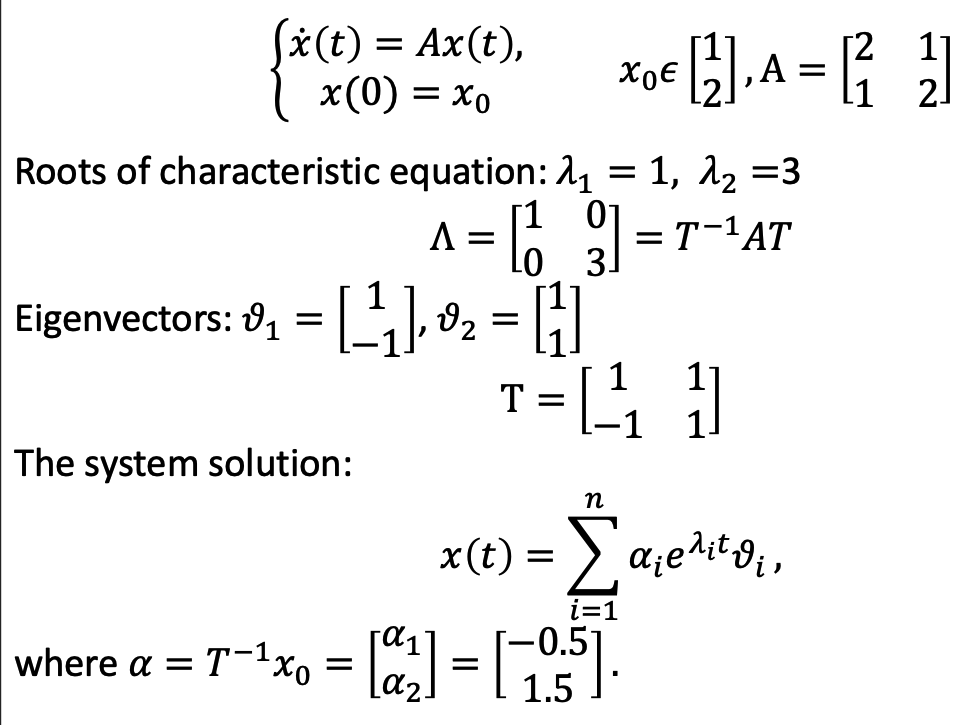
e. Example
Figure out a natural response
III. Stability
To determine if it’s stable or not without solving it.
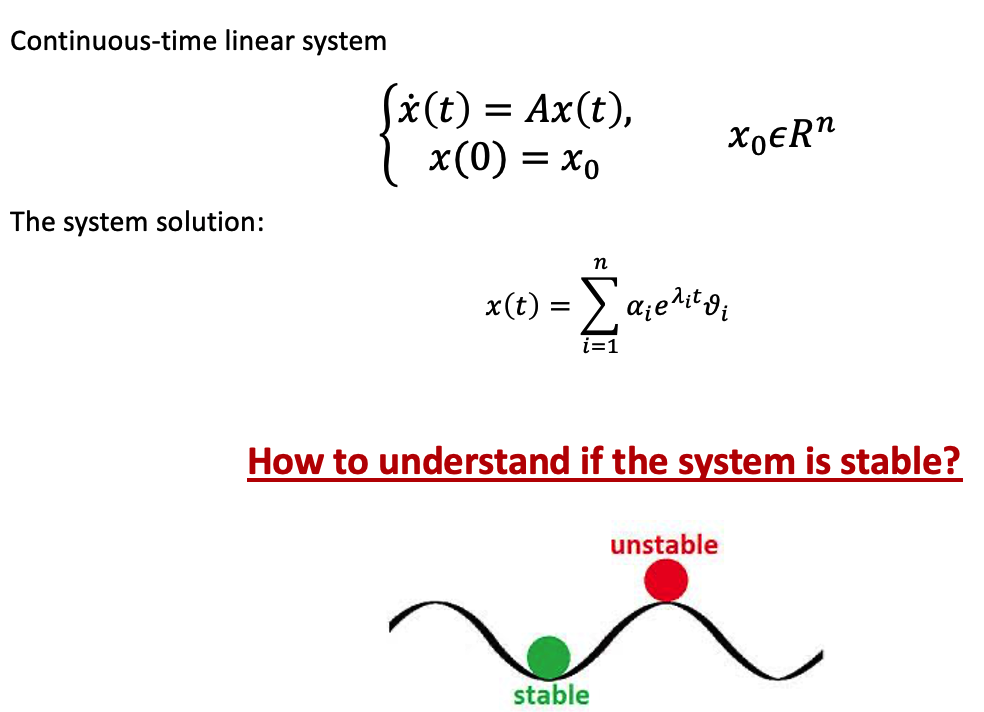
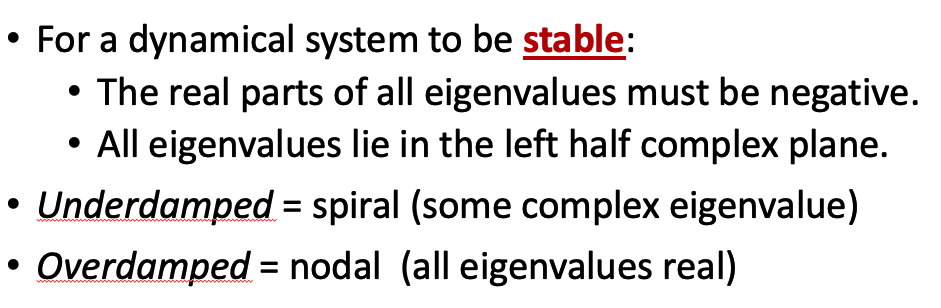
According to the eigenvalues, if there’s a positive 𝛌I, as time goes to infinity, this term goes to infinity as well. It would be unstable
If all eigenvalues are negative, the system would be stable.
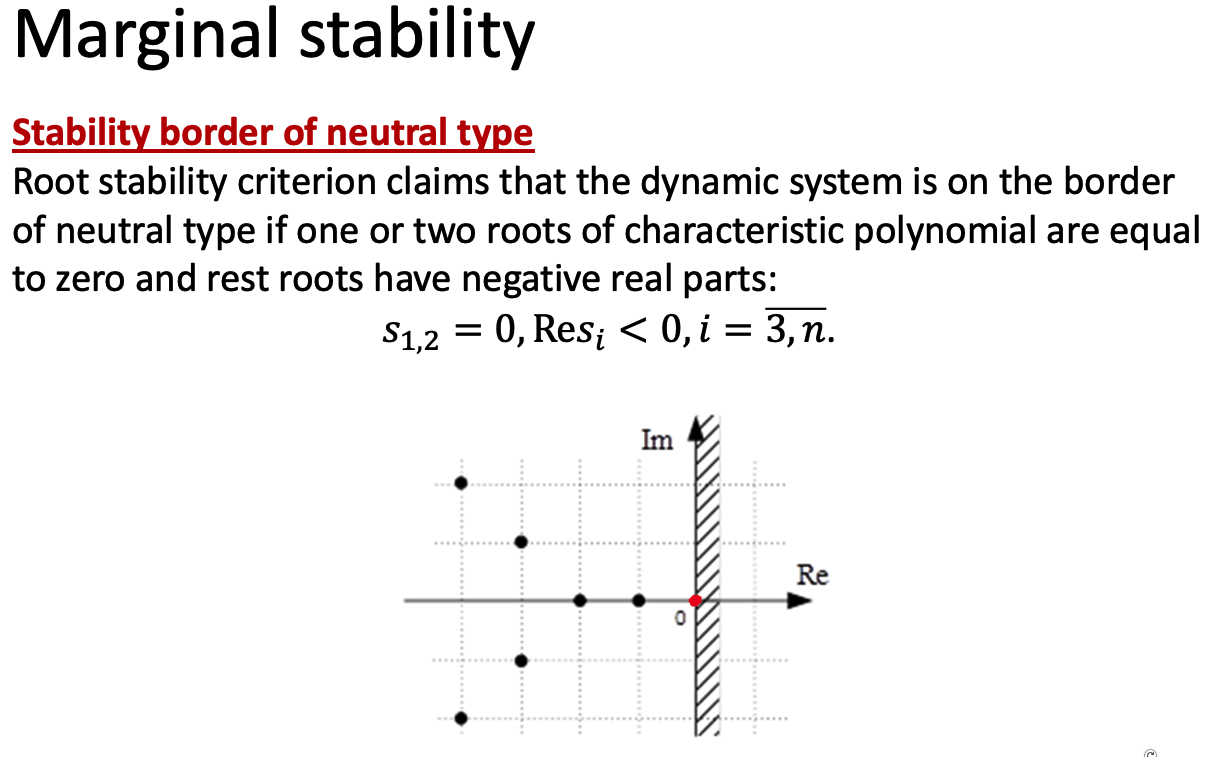
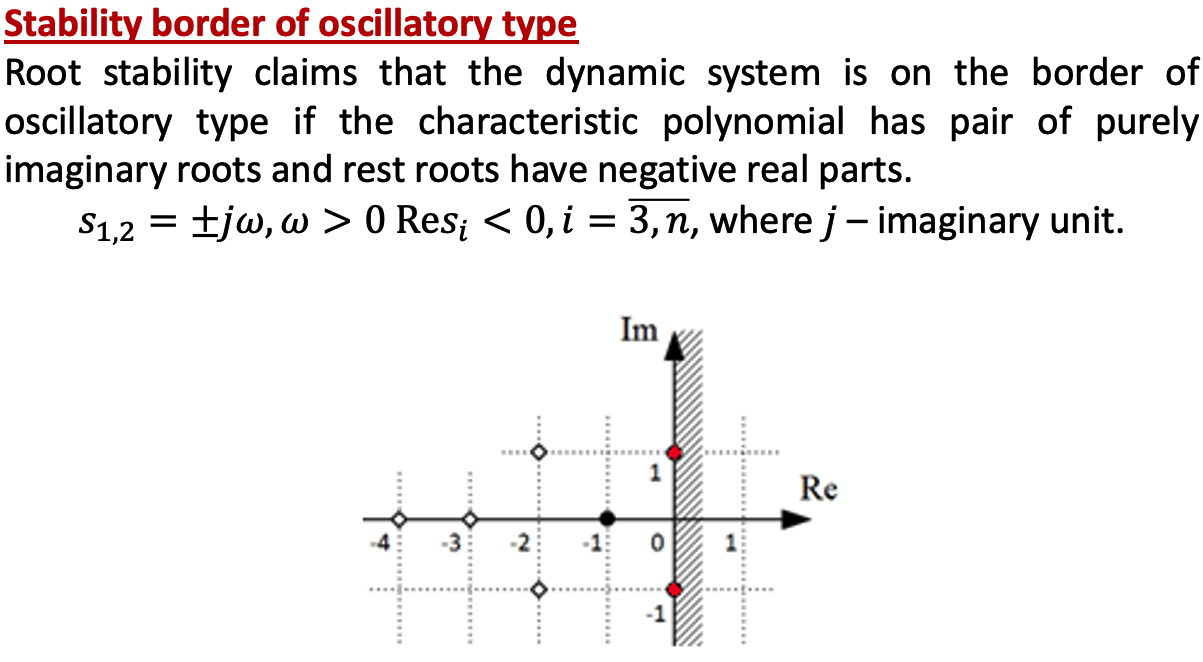
a. Marginal stability
1. Neutral Type
2. Oscillatory Type
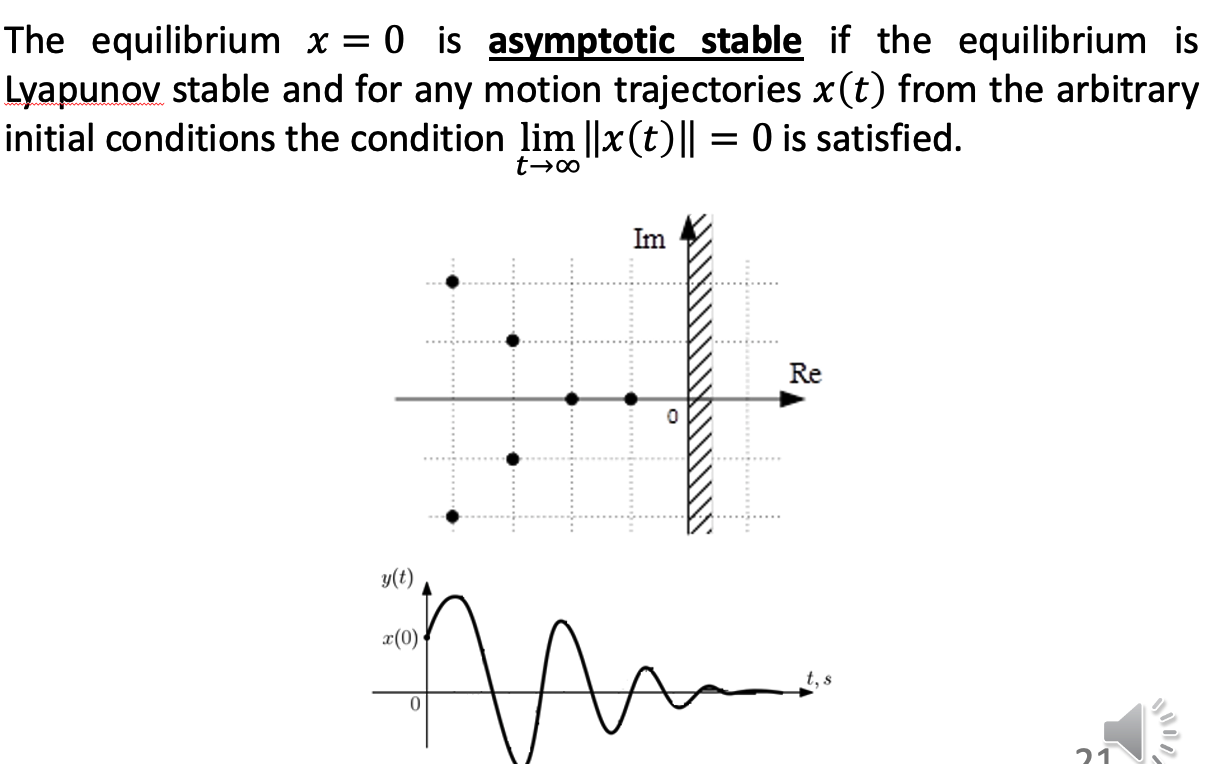
b. Asymptotic stability
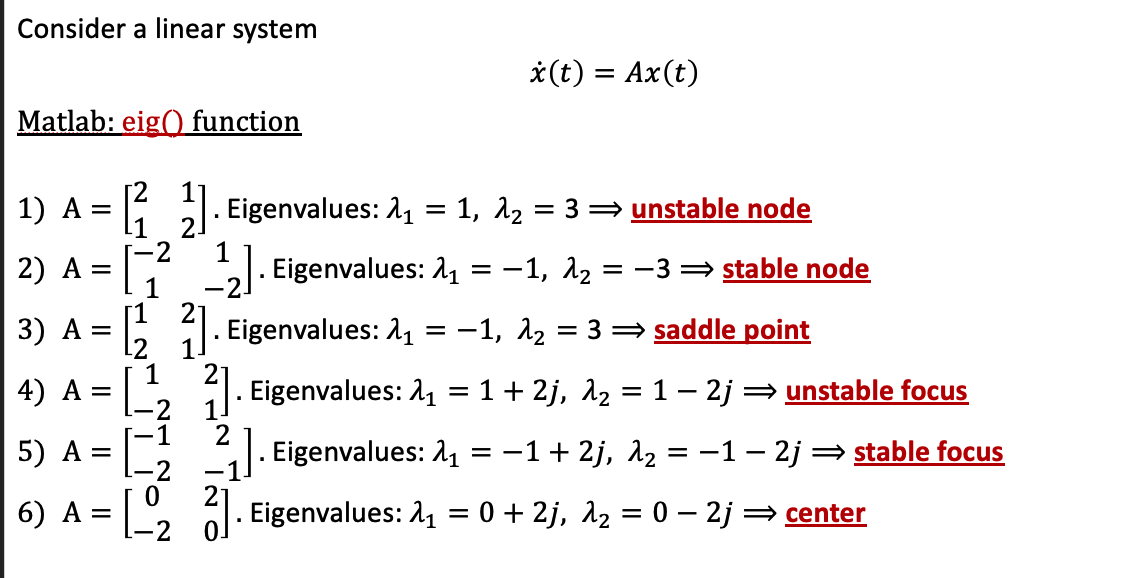
c. Qualitative behaviour of linear systems
1. node behaviour
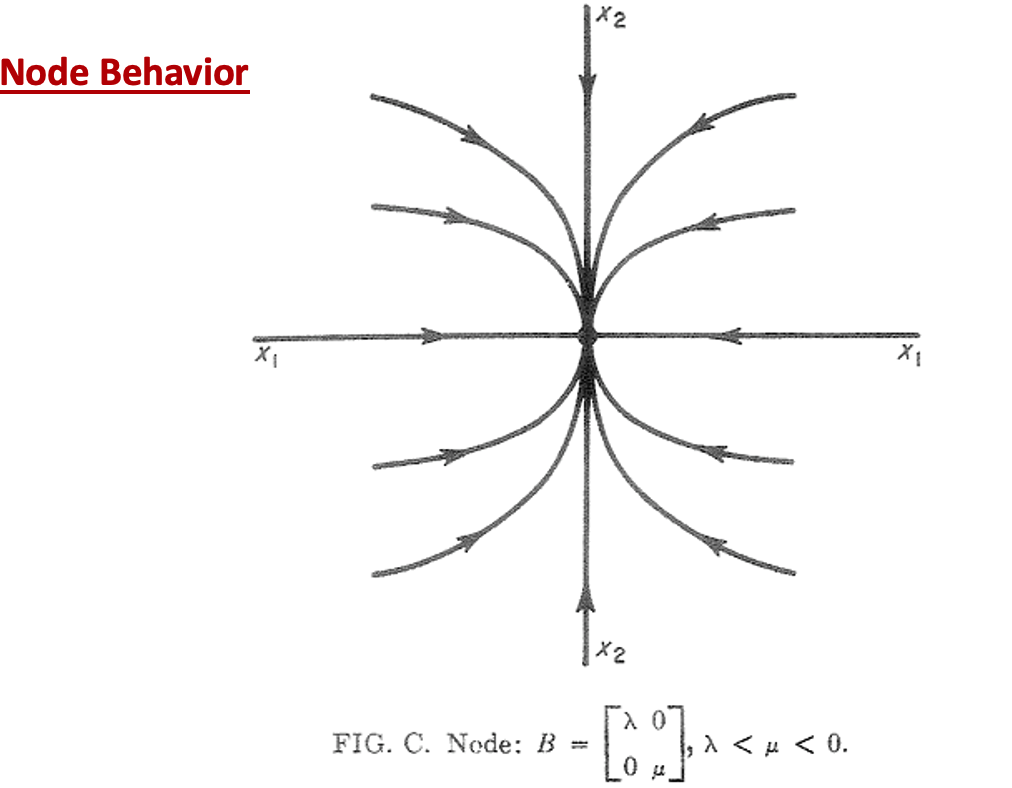
It’s a stable node behaviour (of two real negative eigenvalues), if the system is unstable, the direction of trajectory would be opposite.
2. Saddle behaviour
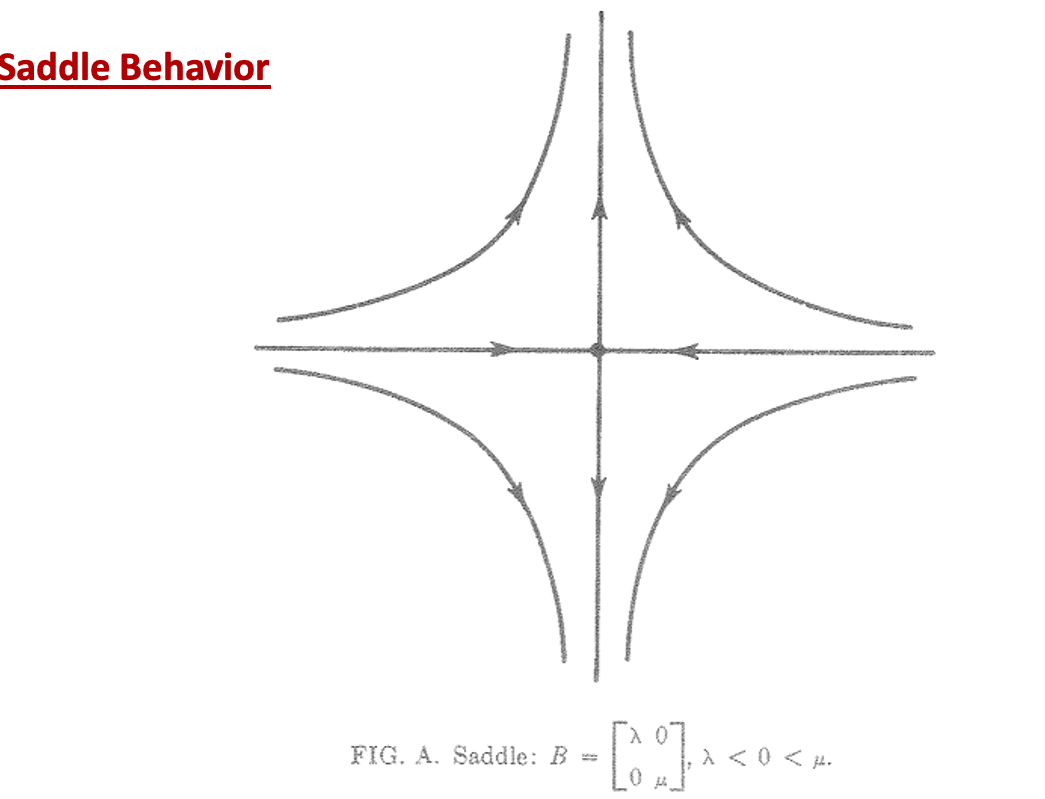
Both are real while one is negative and another is positive.
3. Spiral Behaviour (stable/unstable focus)
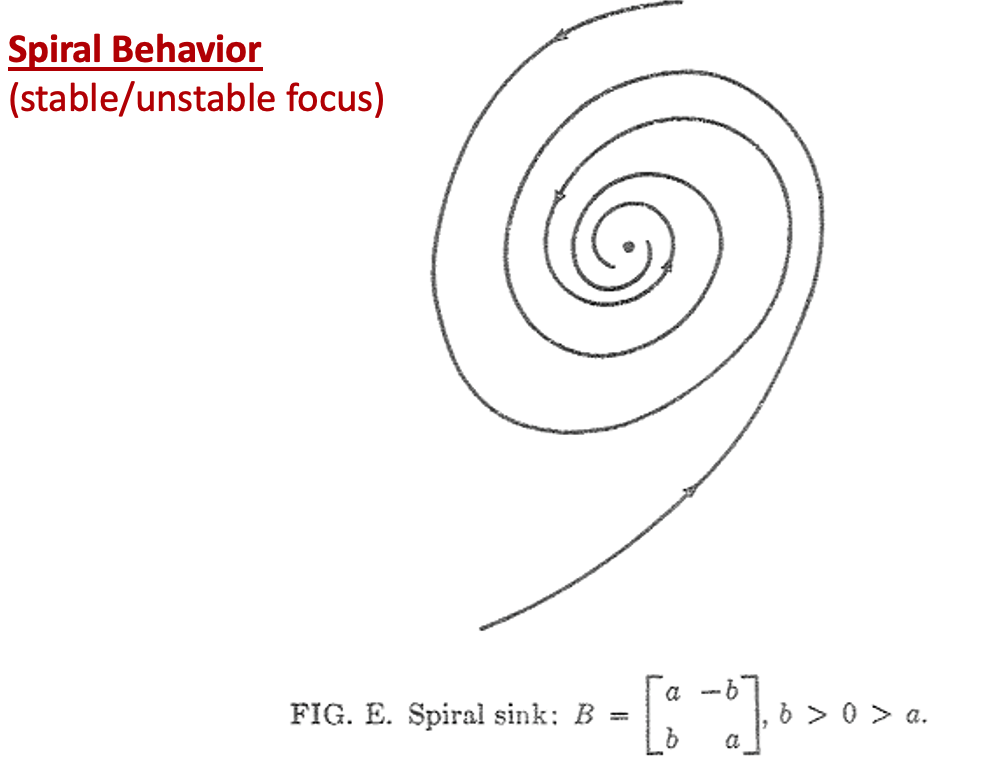
if the real parts is positive, the direction goes opposite.
4. Center behaviour
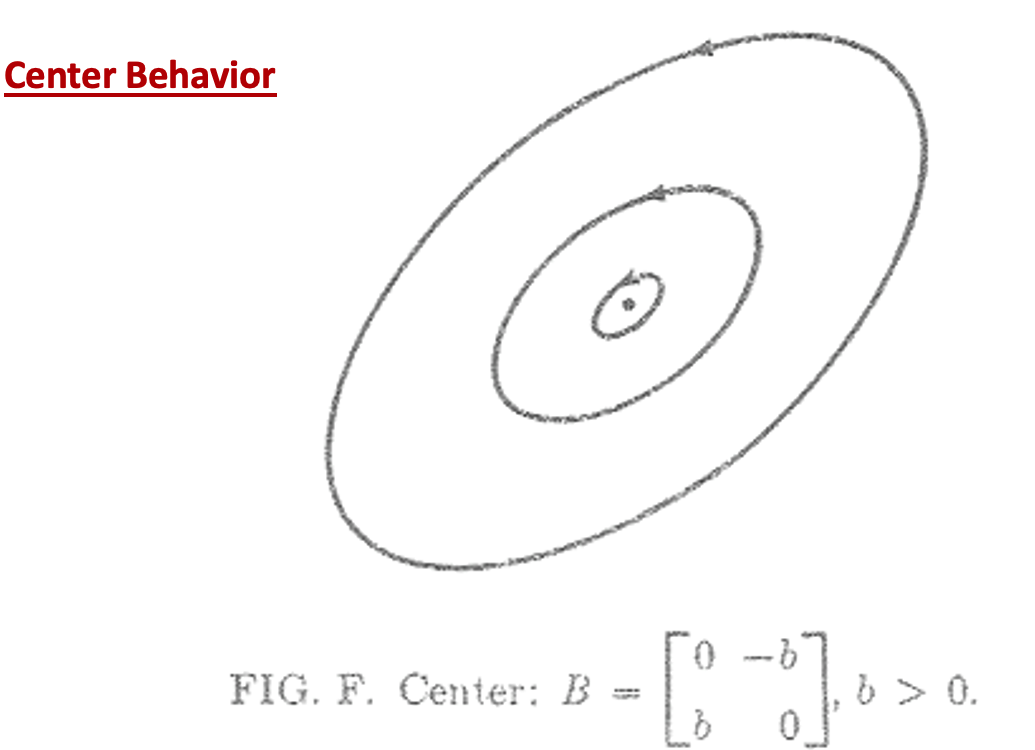
If they are on imaginary axis. the system is Lyuaponuv stable.
d. Examples