Automatic Control Linear Systems PART II
Yup?
Table of Contents
- Lec 3 Laplace Transform and transfer functions
- I. Formal Definition
- II. List of Laplace Transforms
- III. Main properties.
- IV. Solving differential equations with Laplace transform
- V. Natrual and forced response
- VI. Transfer function of dynamical system
- VII. Transfer function and stabiliy
- VIII. General forced response
- IX. Steady-state value
- X. Closed-loop system
Lec 3 Laplace Transform and transfer functions
I. Formal Definition
It’s such a integral. (Actually can be left without remembring it, but it will be better to be in head of course.)
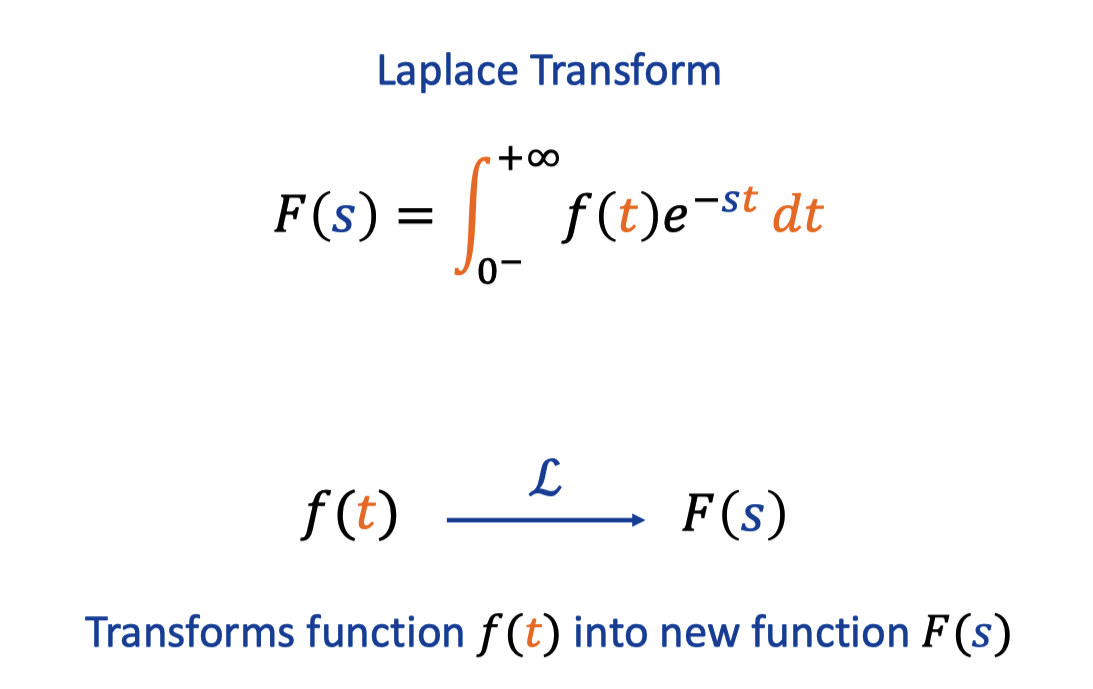
t is eliminated here.
Function of time is changed into function of frequency, sort of. Generlized.
II. List of Laplace Transforms
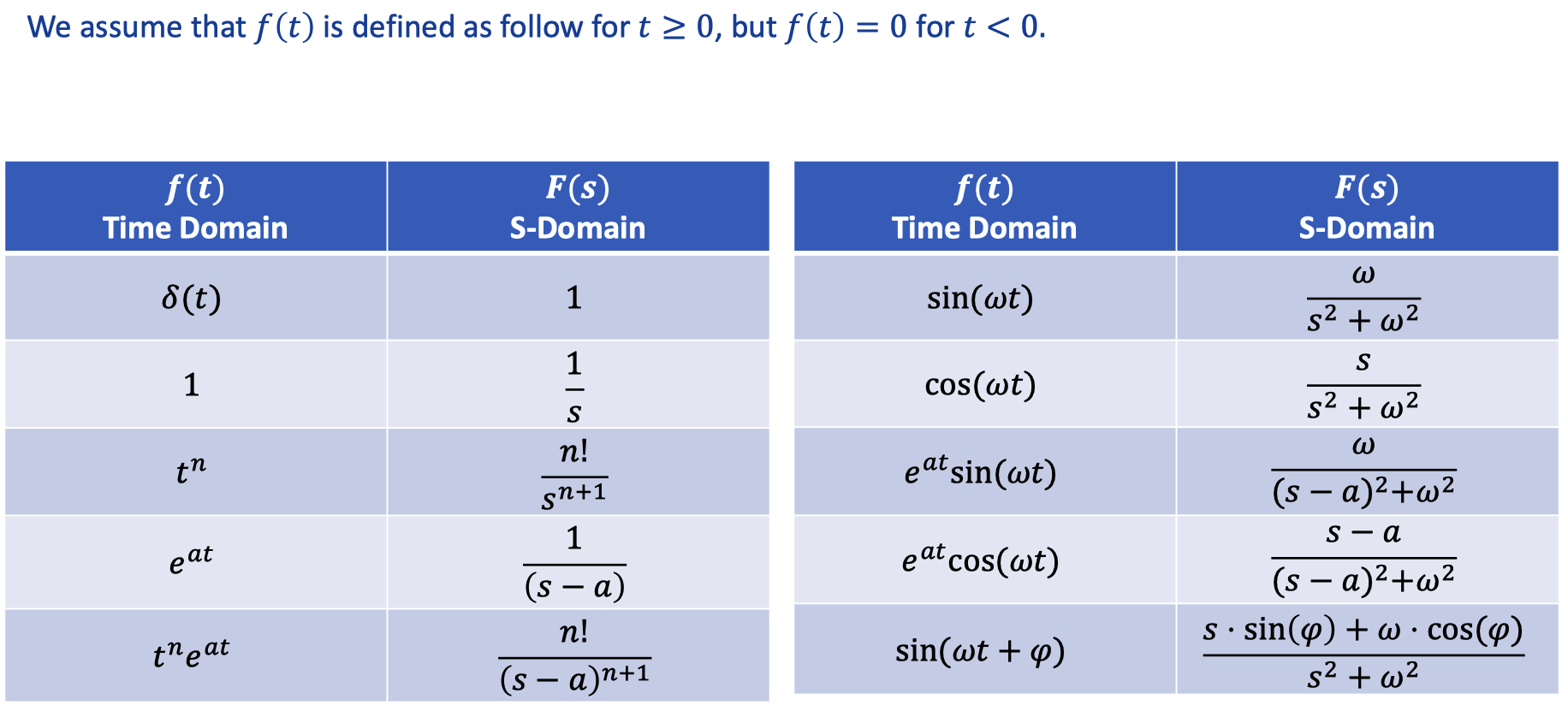
1. 𝜹 function
It’s not actually a function, which is called distribution, or a generlized function. It can be regarded as zero except that it is infinity when t equals zero.
2. 1
It’s a step function. (seeing definition not here, it’s simple)
3. Polynominal function
Two case before is the speical case for this.
4. Expoential fucntion
One of the most important one.
5. General version.
Generlized case 3 and 4. Good assumption.
6. Sin and Cos function
Images in the laplace domain. Important as well. Same denominator.
7. SHM with exponential
Generlized case 4 and 6.
8. Normal sin func
Not important one.
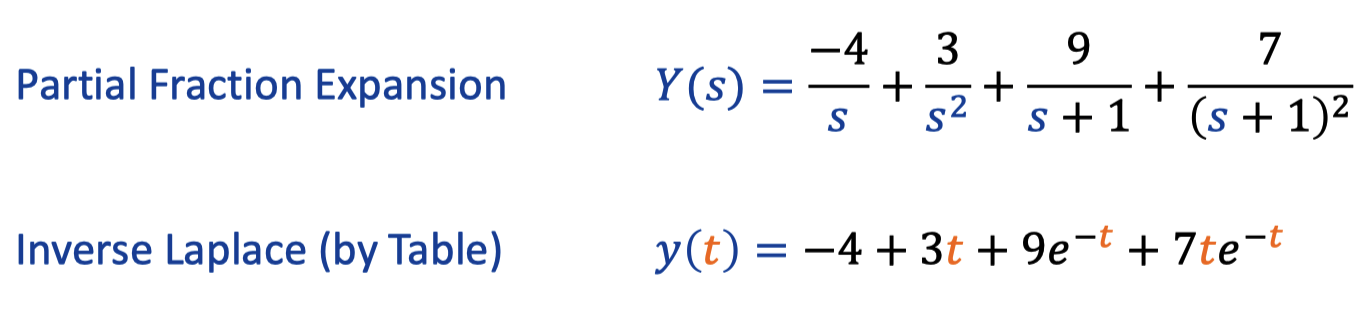
They look like more simple than the original, you get some fractional and rational fucntion.
III. Main properties.
1. The reasons we love them.
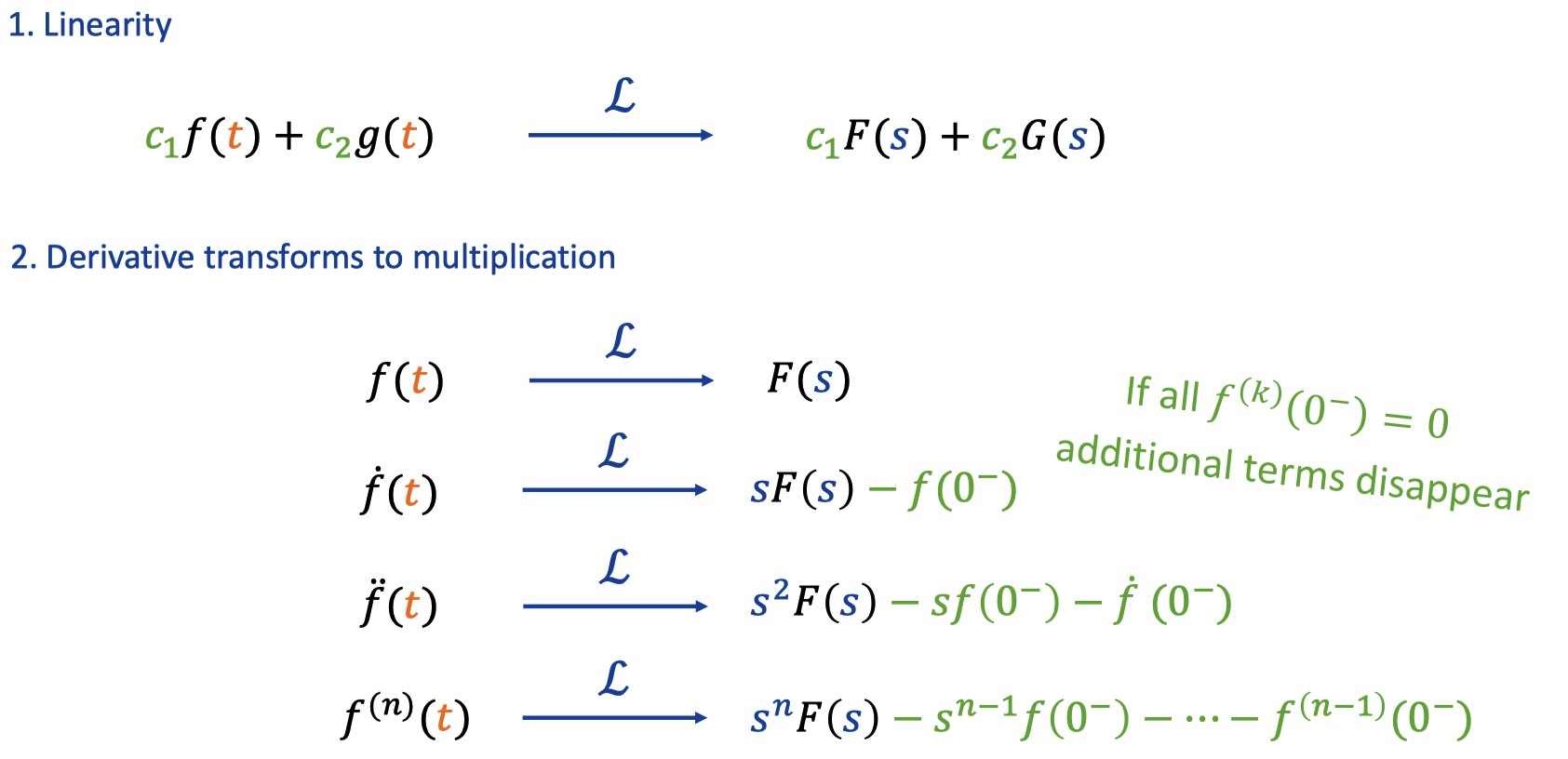
The green parts disappear (only when at inital moment, it is zero).
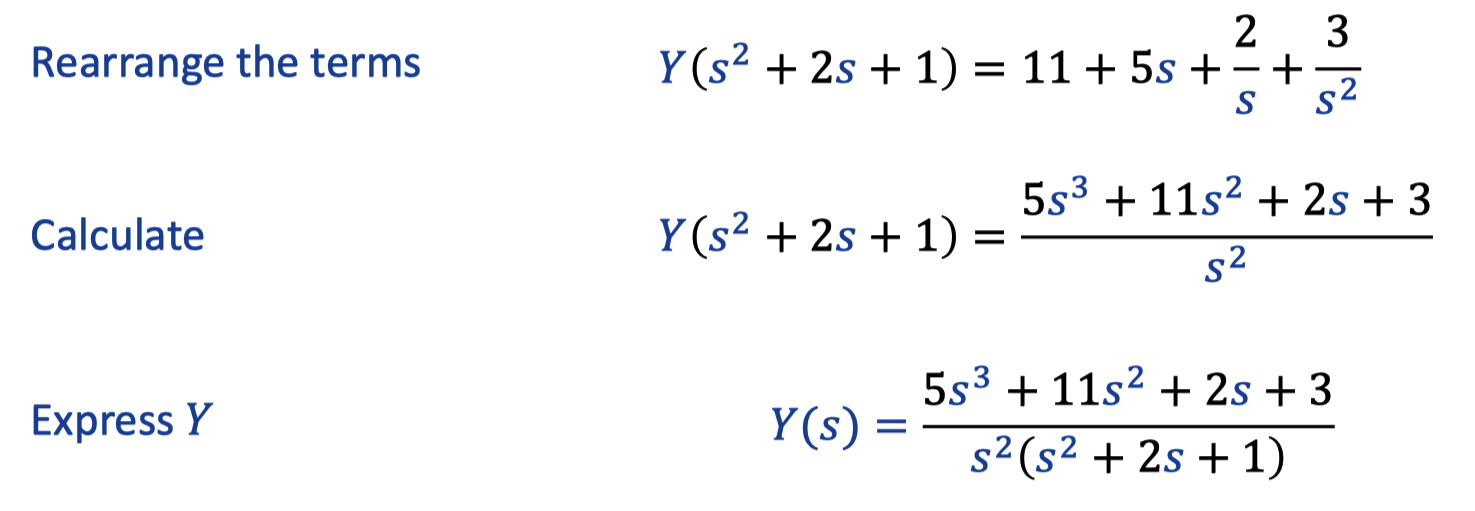
IV. Solving differential equations with Laplace transform
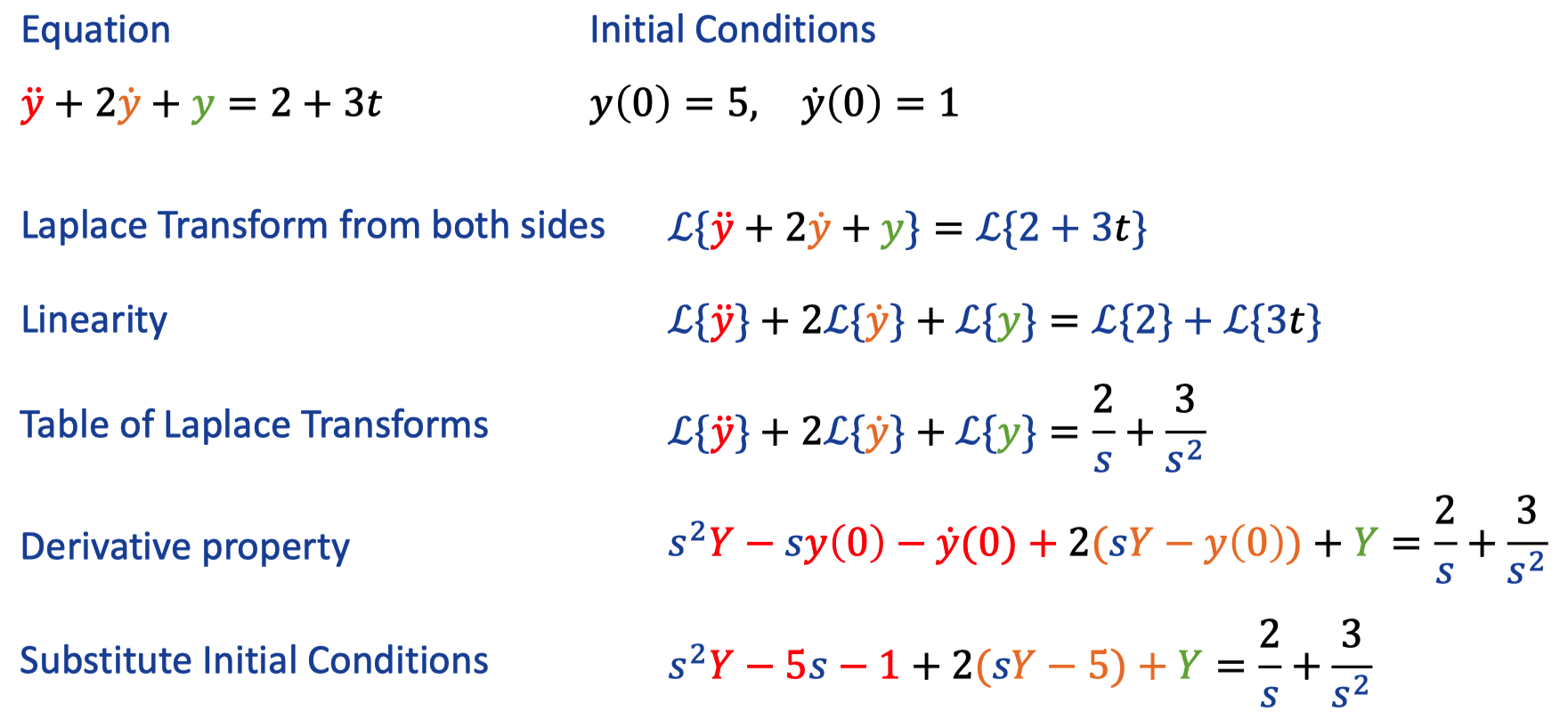
- Note that we consider that it happens in the positive moments, and when it comes to negative ones, they have 0.
- Capitial Y is sth we don’t know yet, and we denote it in such way.
V. Natrual and forced response
1. Case Analysis
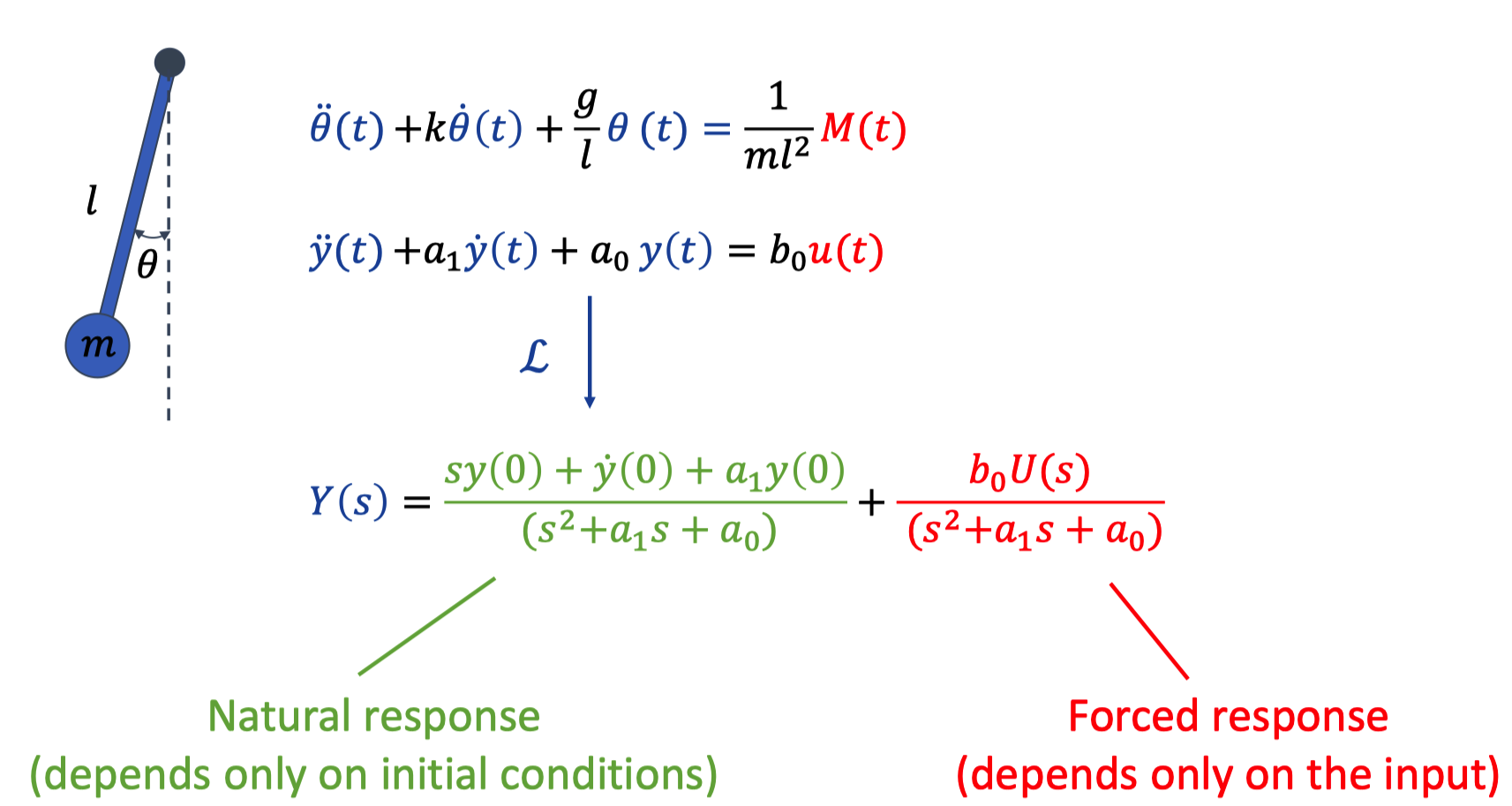
After inverse Laplace
- Word ‘Eigen’ is similiar to characteristic
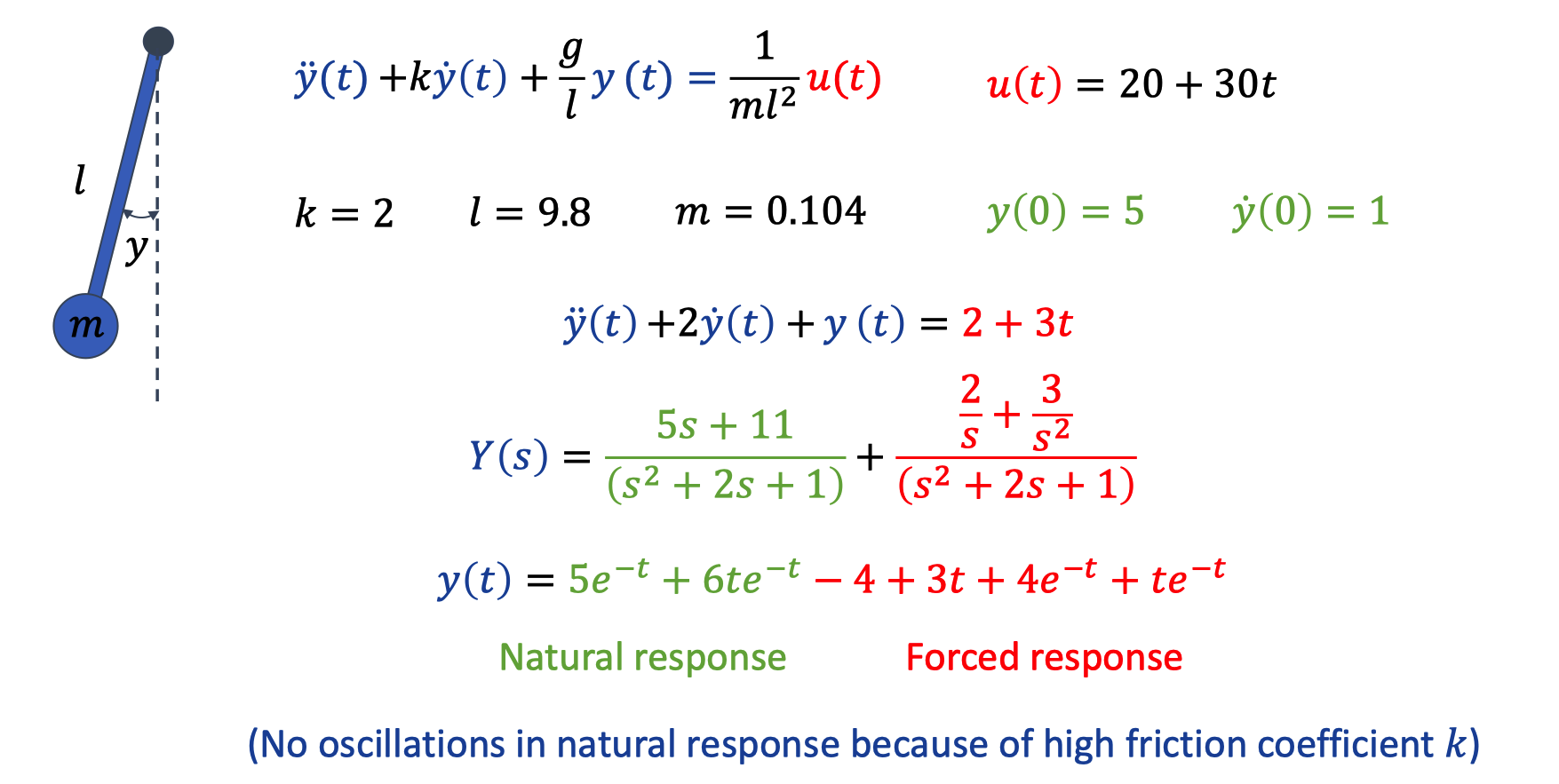
2. Example
VI. Transfer function of dynamical system
1. Dynamical system
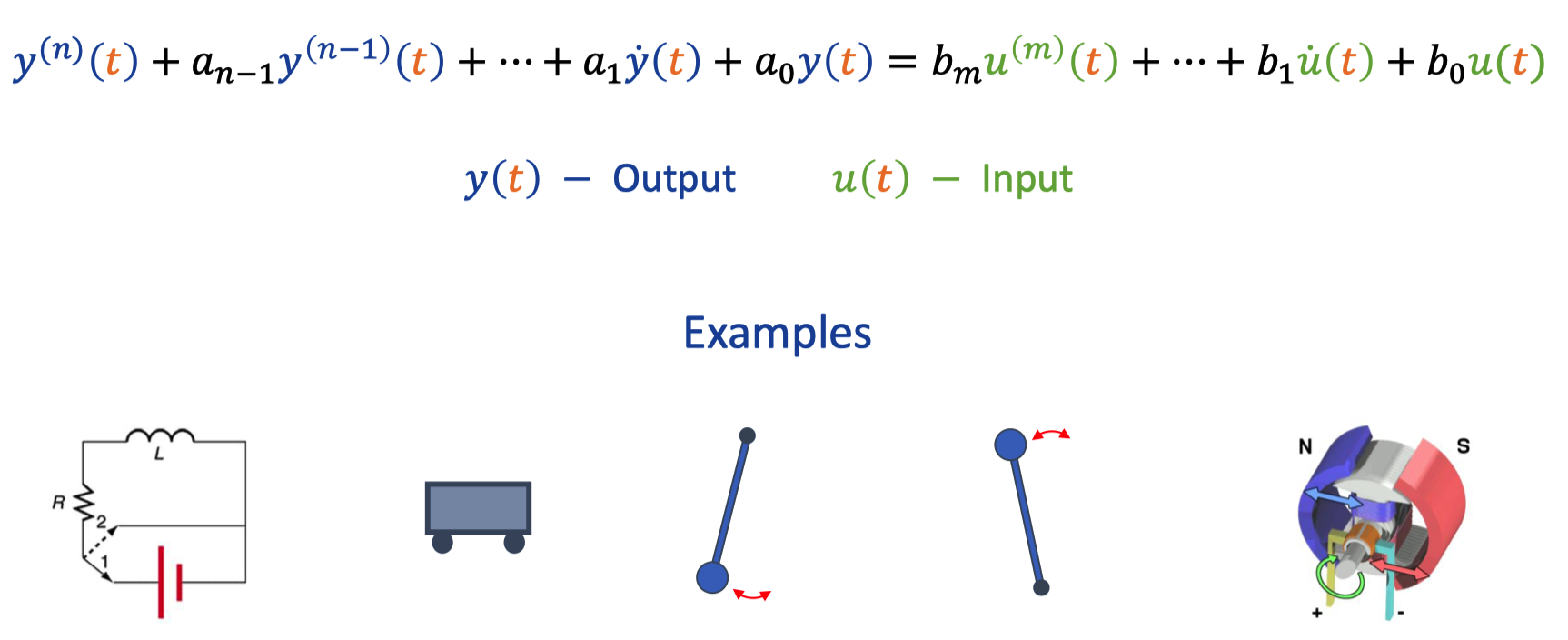
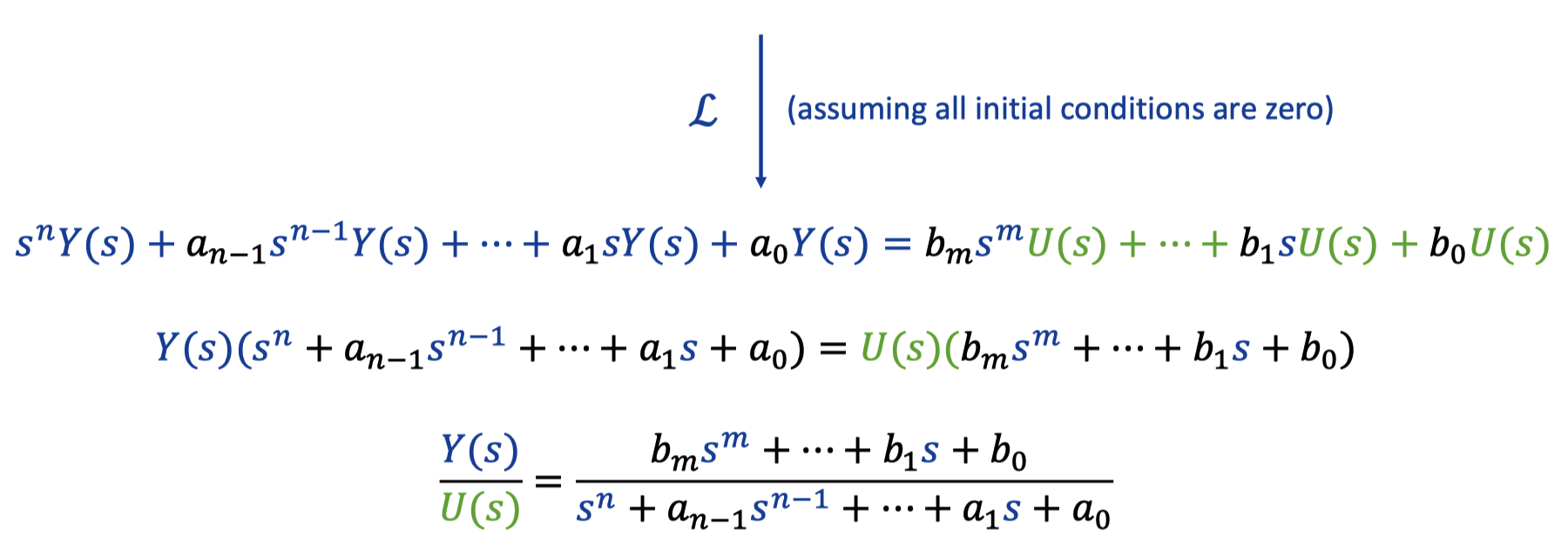
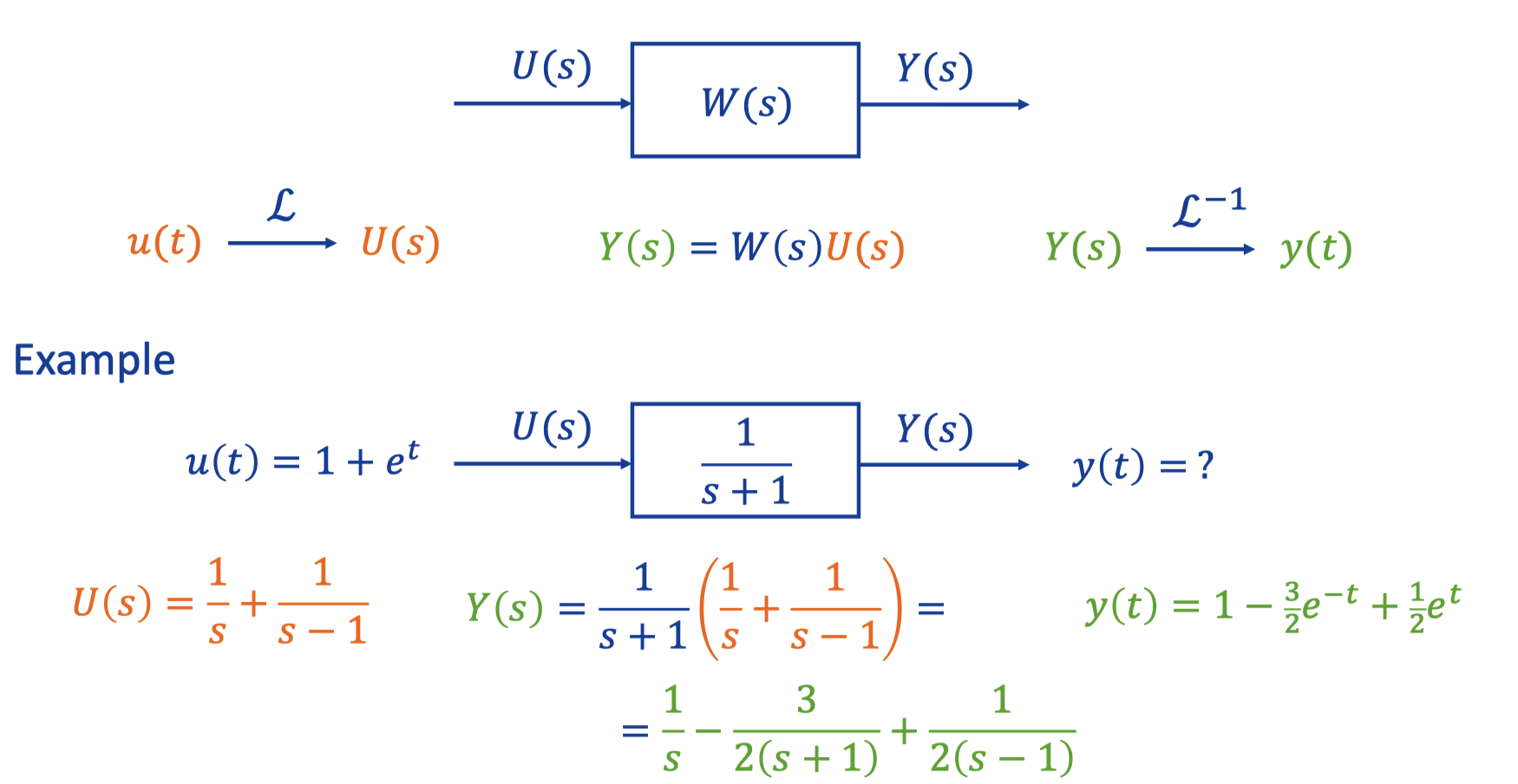
Transfer function - Ratio between Laplace Images of an Output and an Input of a linear system.
- Assuming all inital conditions are zero.
- Do not depend on particular choice of input.
It captures the behaviour of the system with a respond to every possible input.
Way of representing a system.
VII. Transfer function and stabiliy
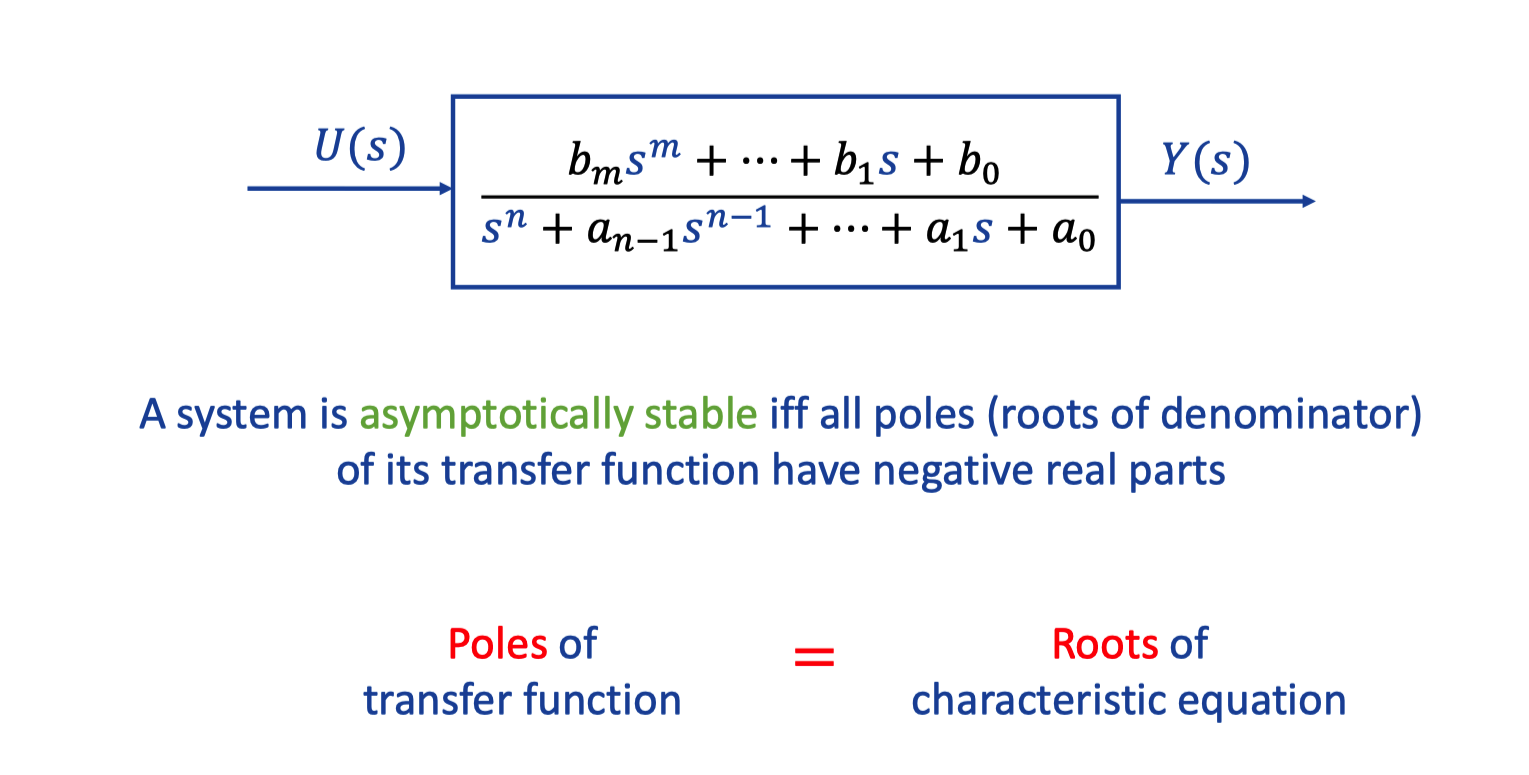
- Zeros are the roots of numerator
1. Impulse Response and step respose
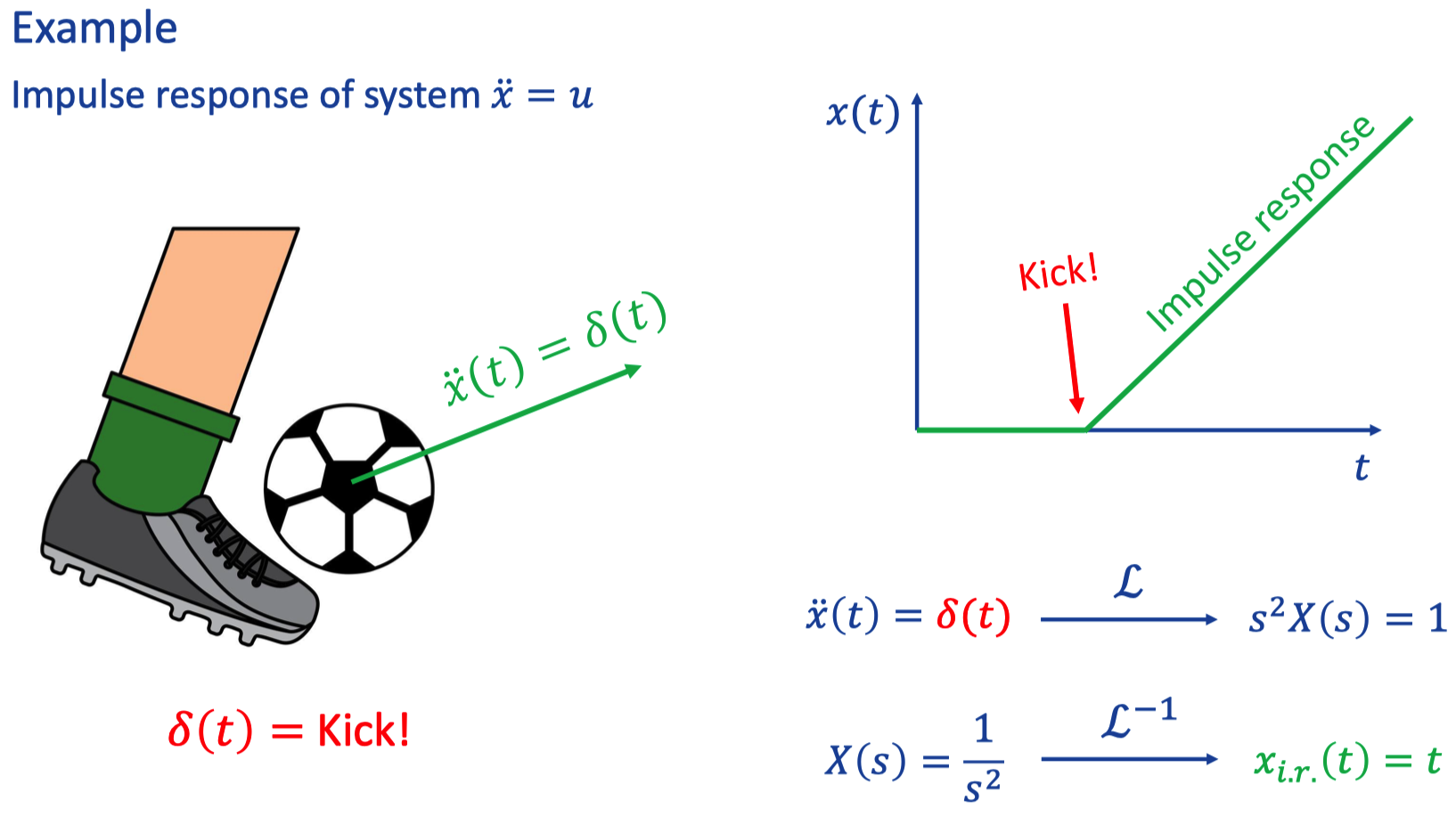
a. Impulse response
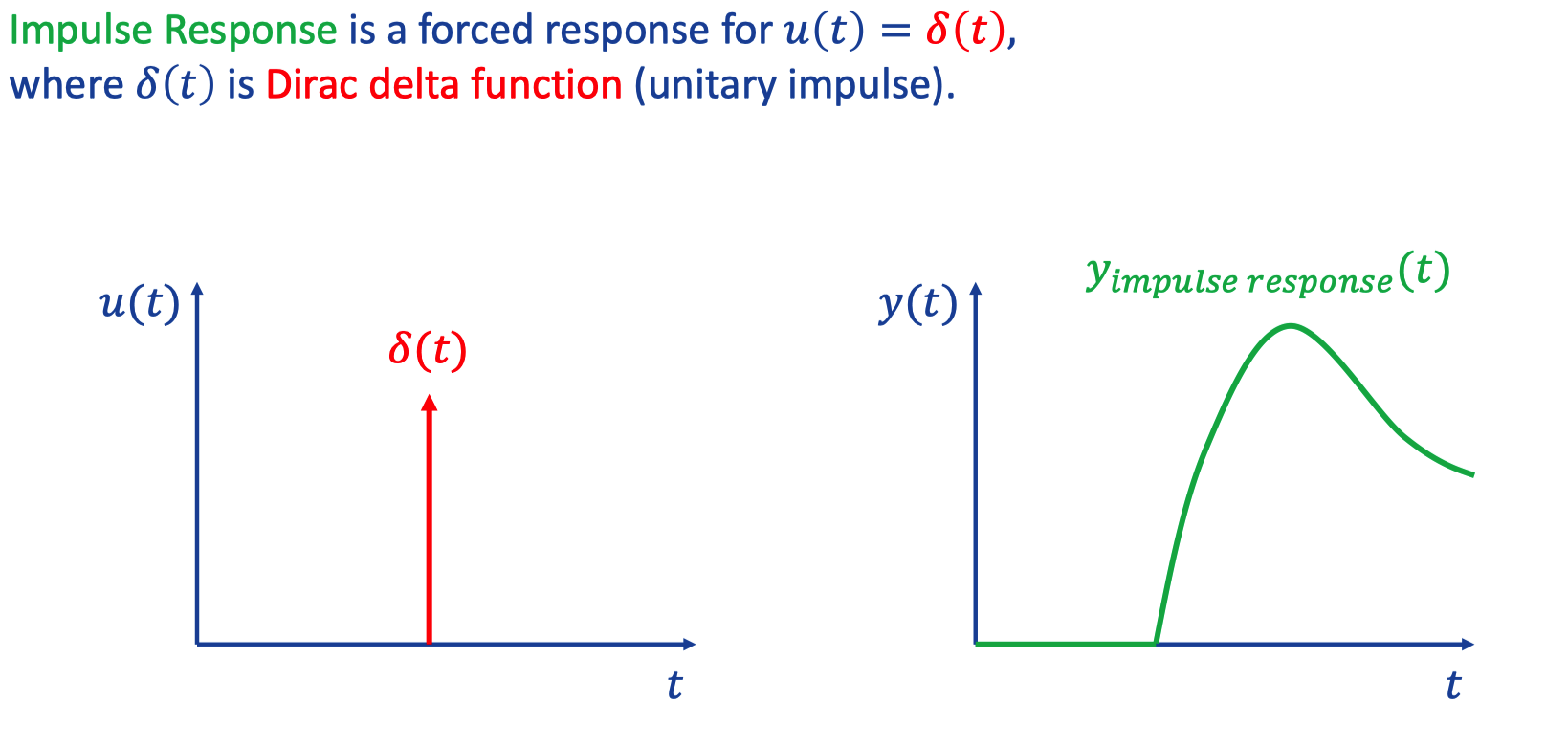
The integral of 𝝳(t) equals to 1. (Fiction function)
Eg. To hit a Pendulum | Ball.
b. Easy to check
Laplace tranform of impulse function equals to the transfer function
$\mathcal{L}\{y_{impulse response}(t)\} = W(s)$
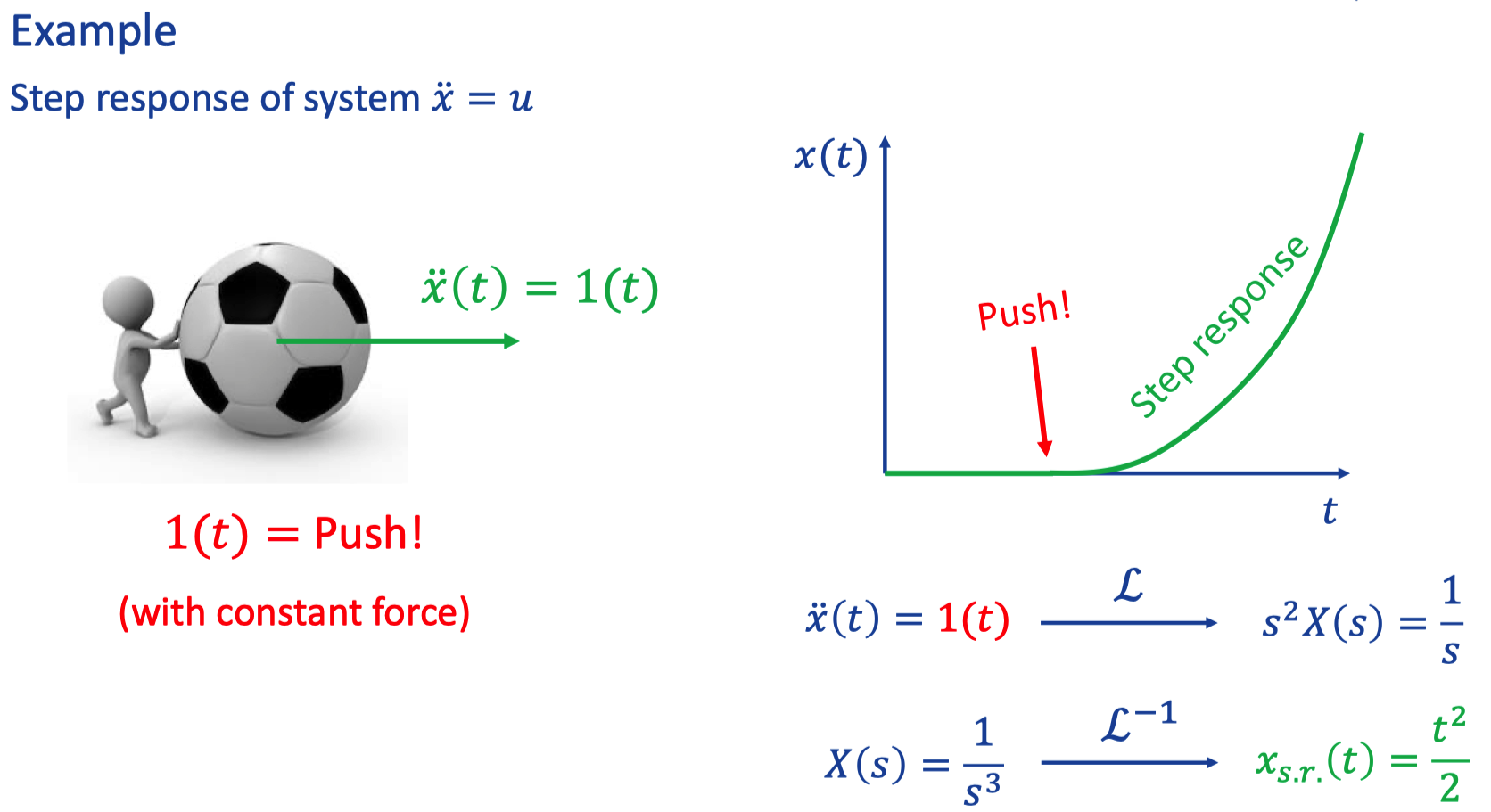
c. Step response
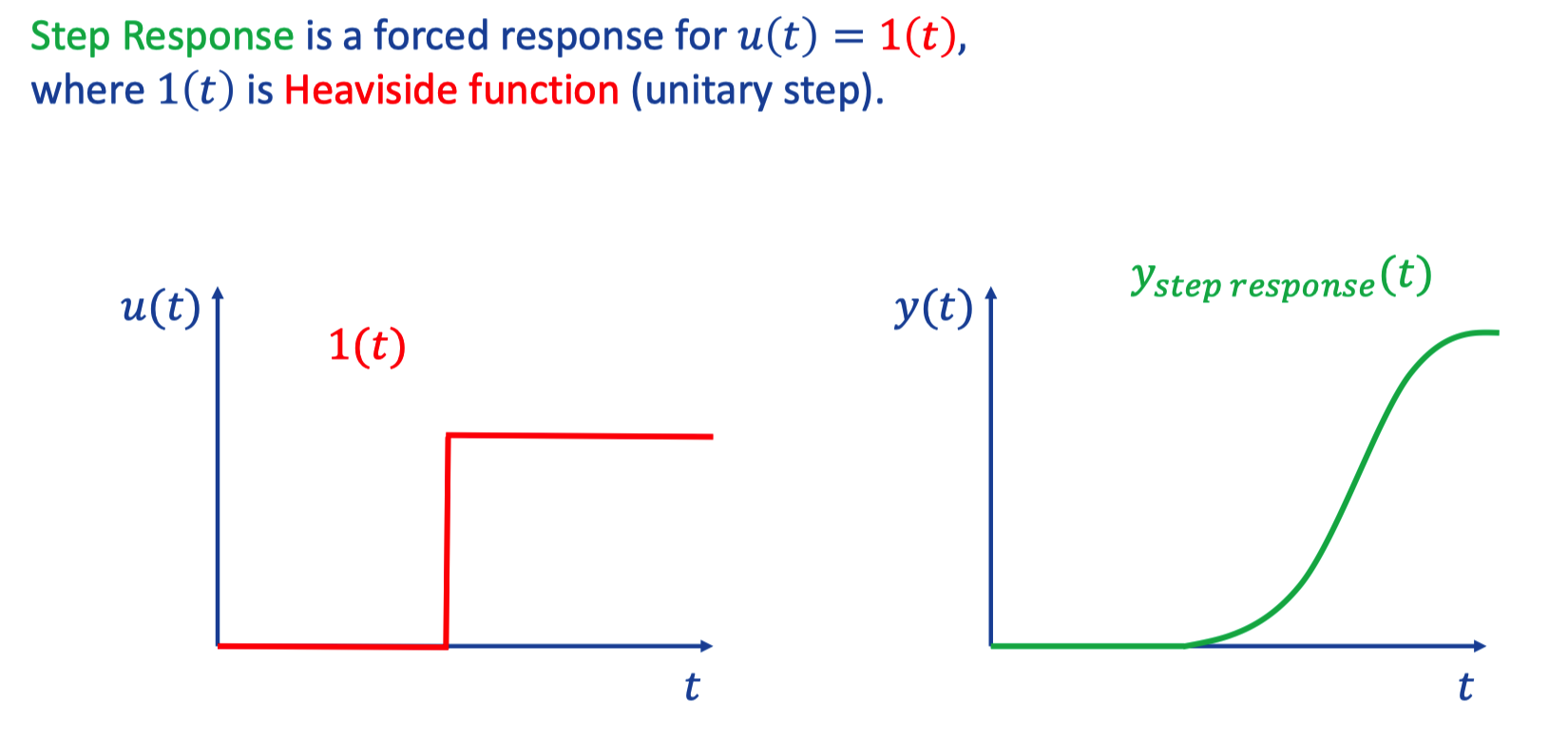
- The Heaviside step function, or the unit step function, usually denoted by H or θ (but sometimes u, 1 or 𝟙), is a discontinuous function), whose value is zero) for negative arguments and one) for positive arguments.
VIII. General forced response
IX. Steady-state value
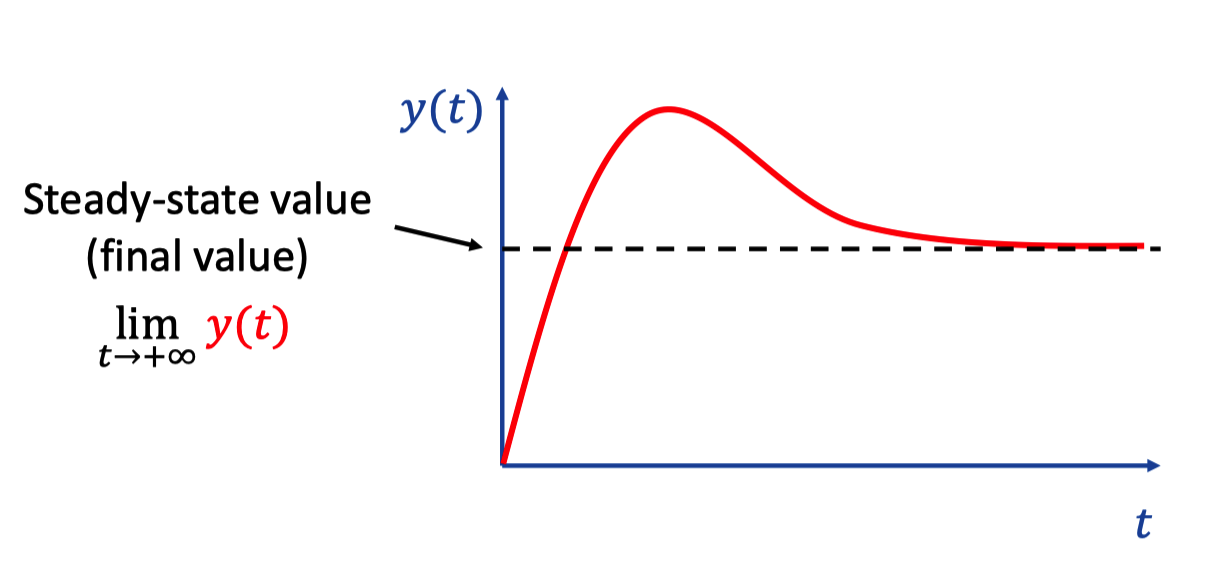
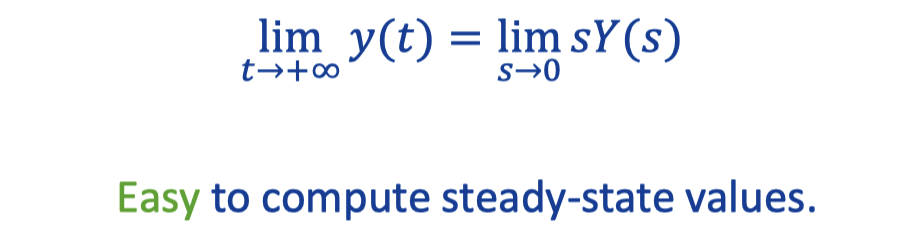
1. Final value thorem
If every pole of Y(s) is either in the negative half-plane (In complex plane), or at the origin and Y(s) has at most a single pole at the origin, then
a. Example
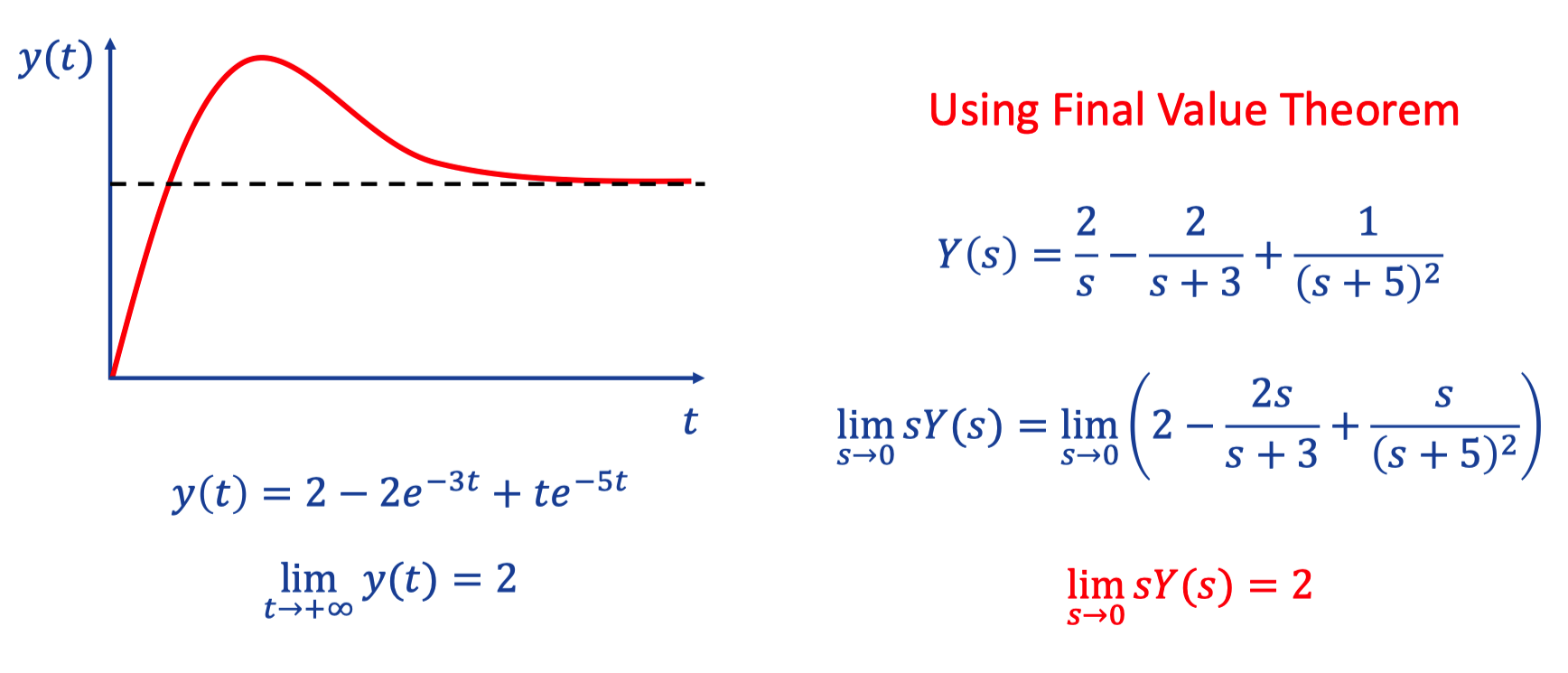
- **Note that the euqation should satisfies conditions**
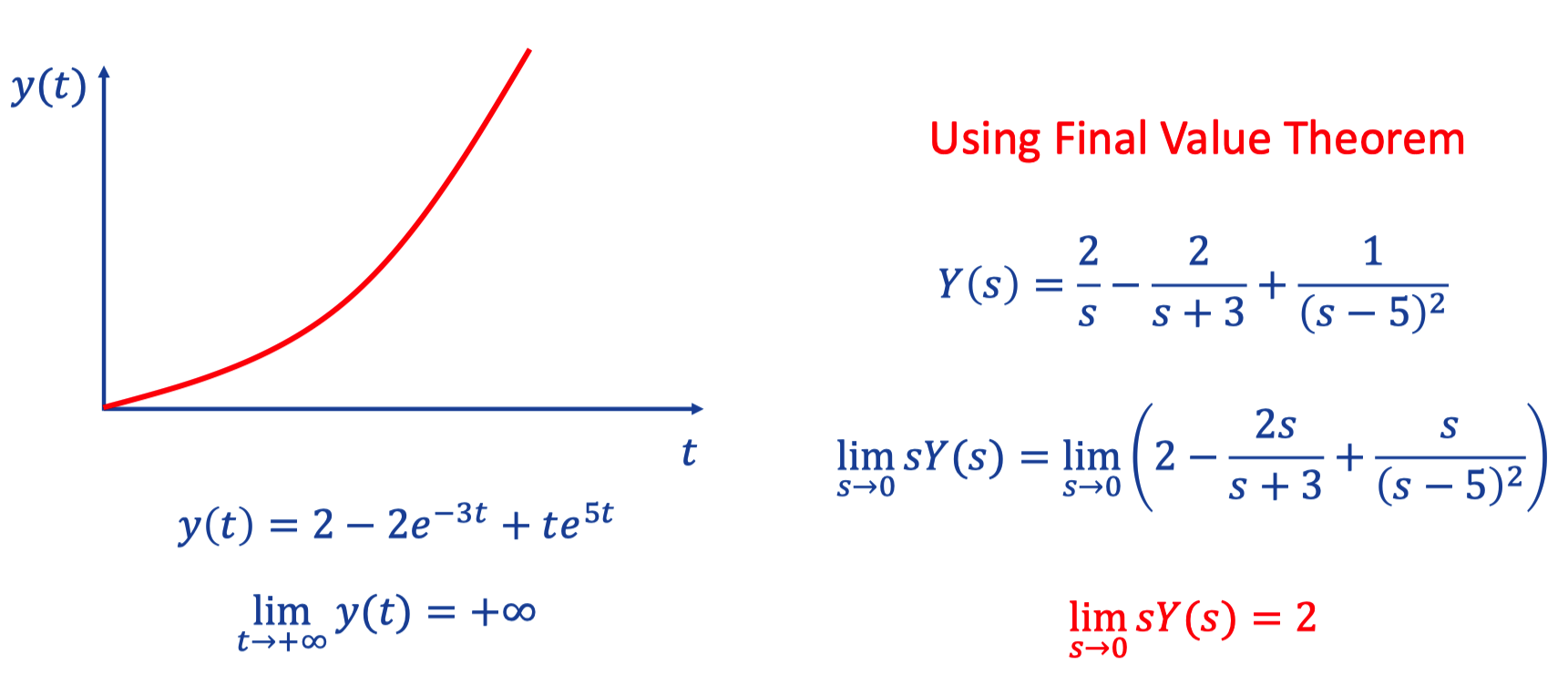
b. Anti-example
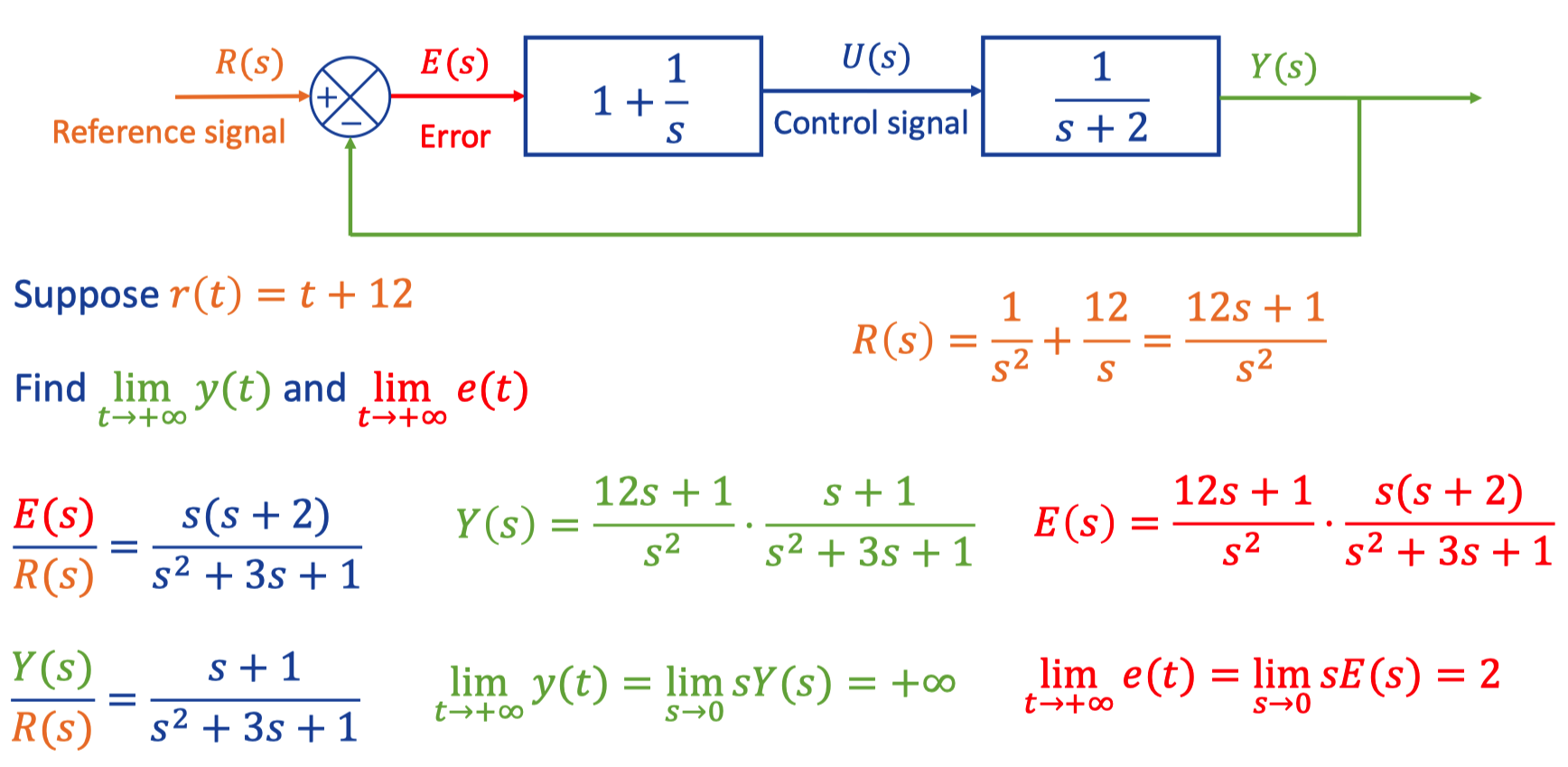
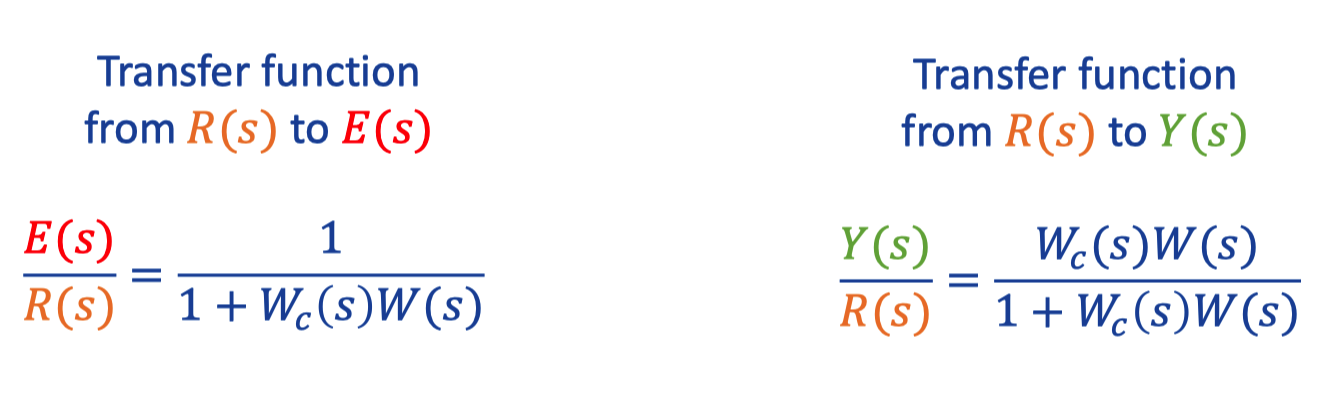
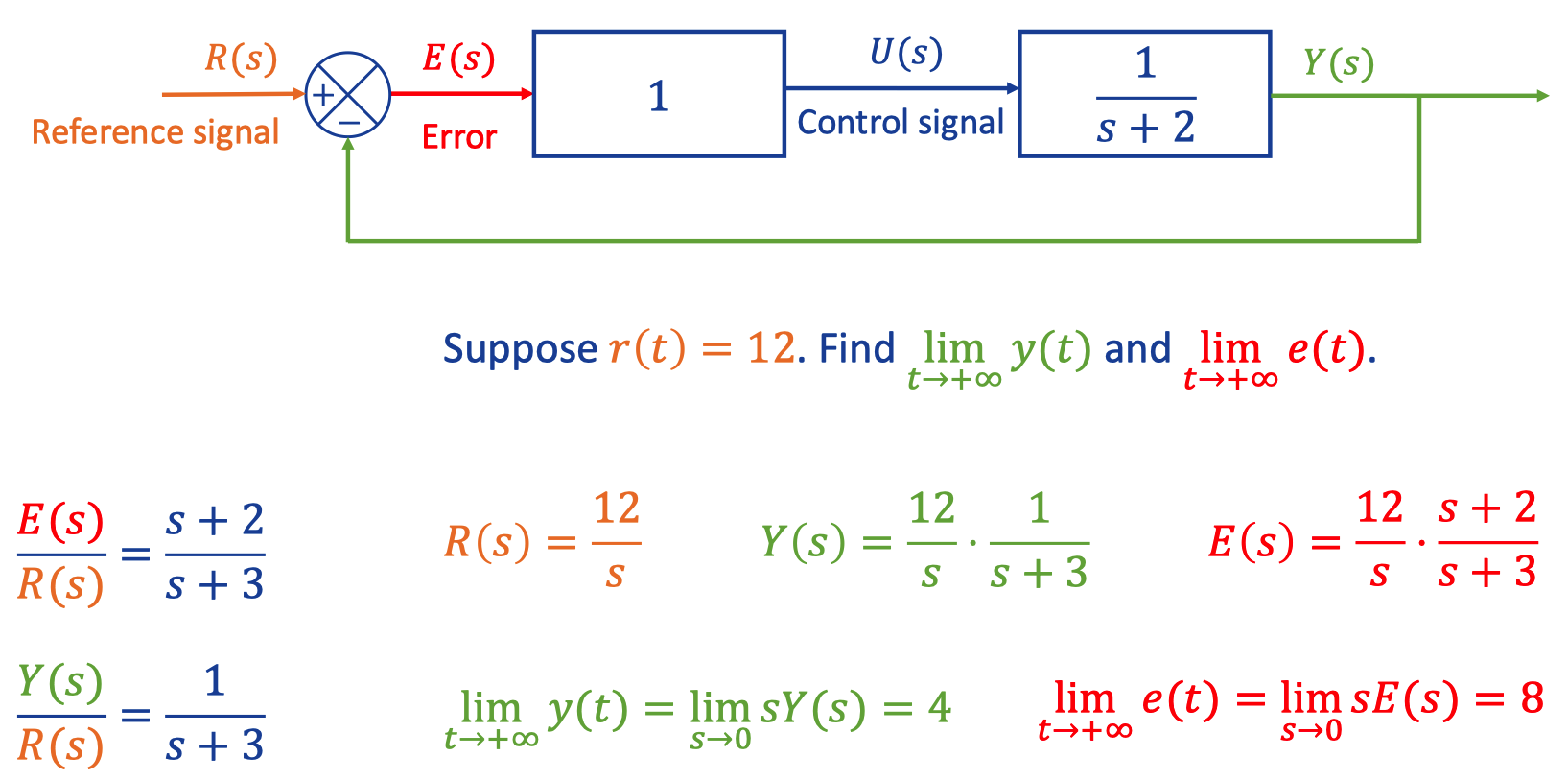
X. Closed-loop system
1. Two basic type
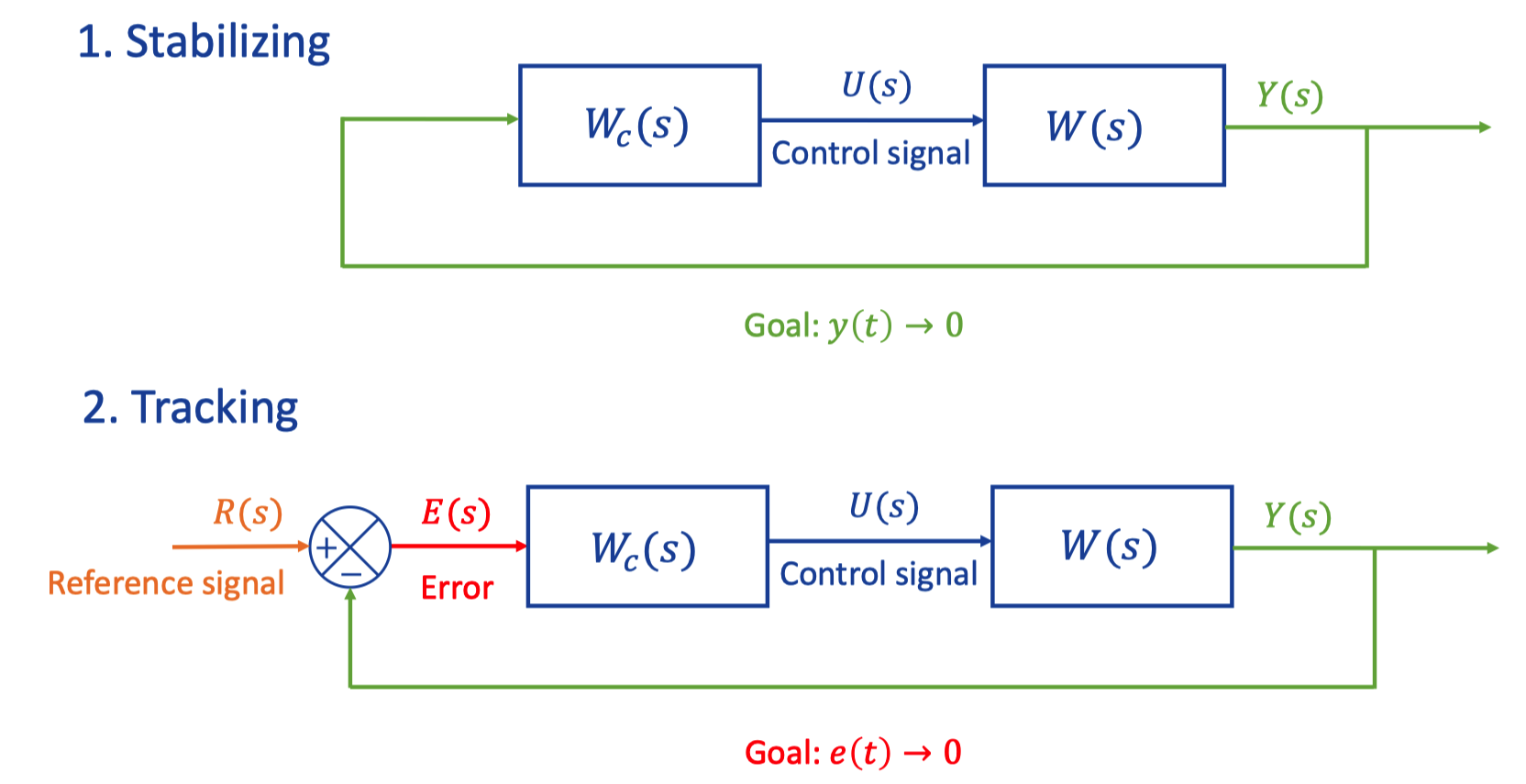
Controller -> System
2. Example
a. eg1
b. eg2